EXO:ORGAN
👁 1872 |
| 2022-11
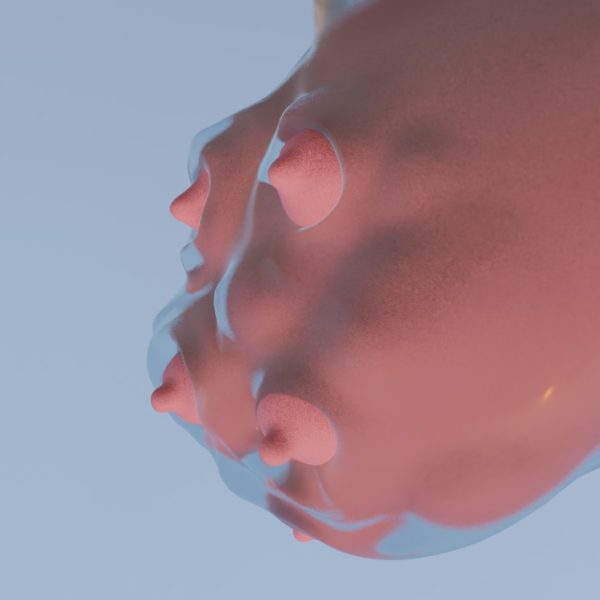
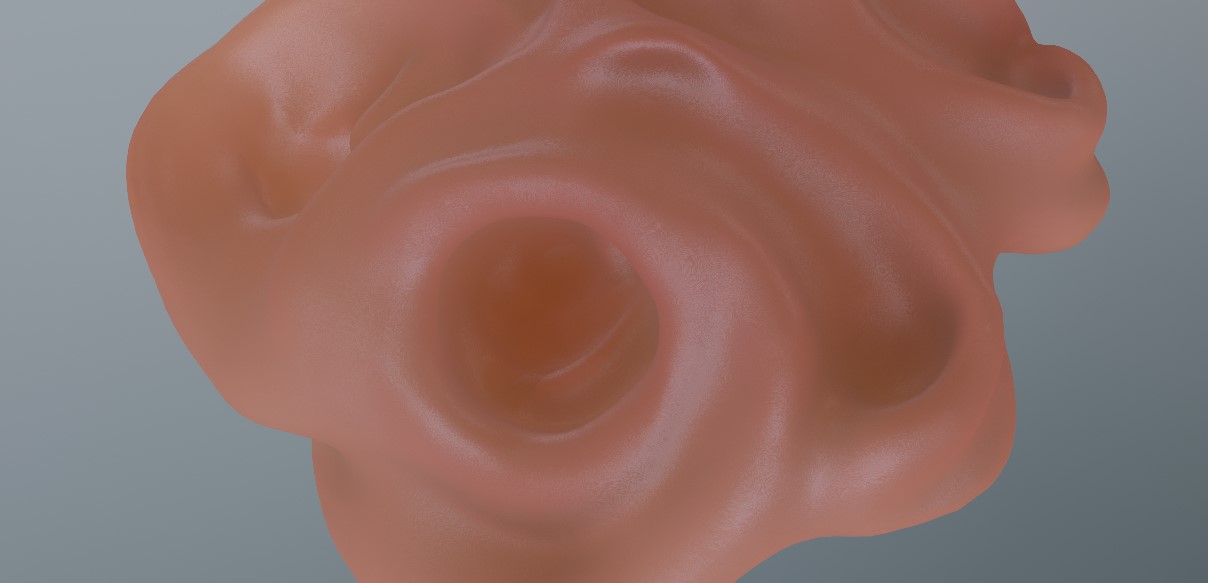
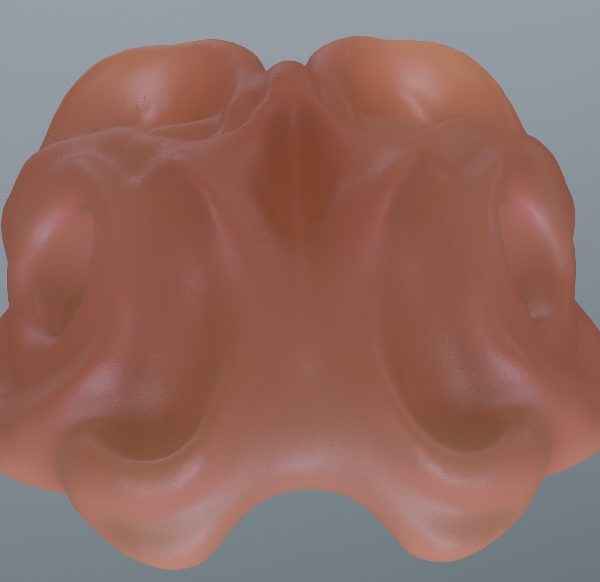
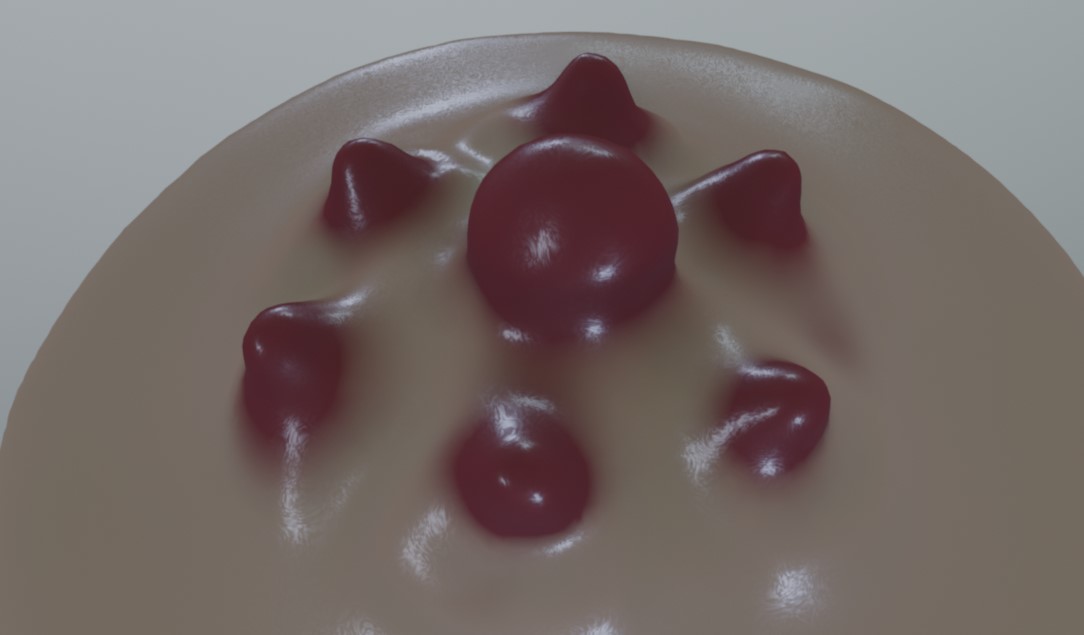
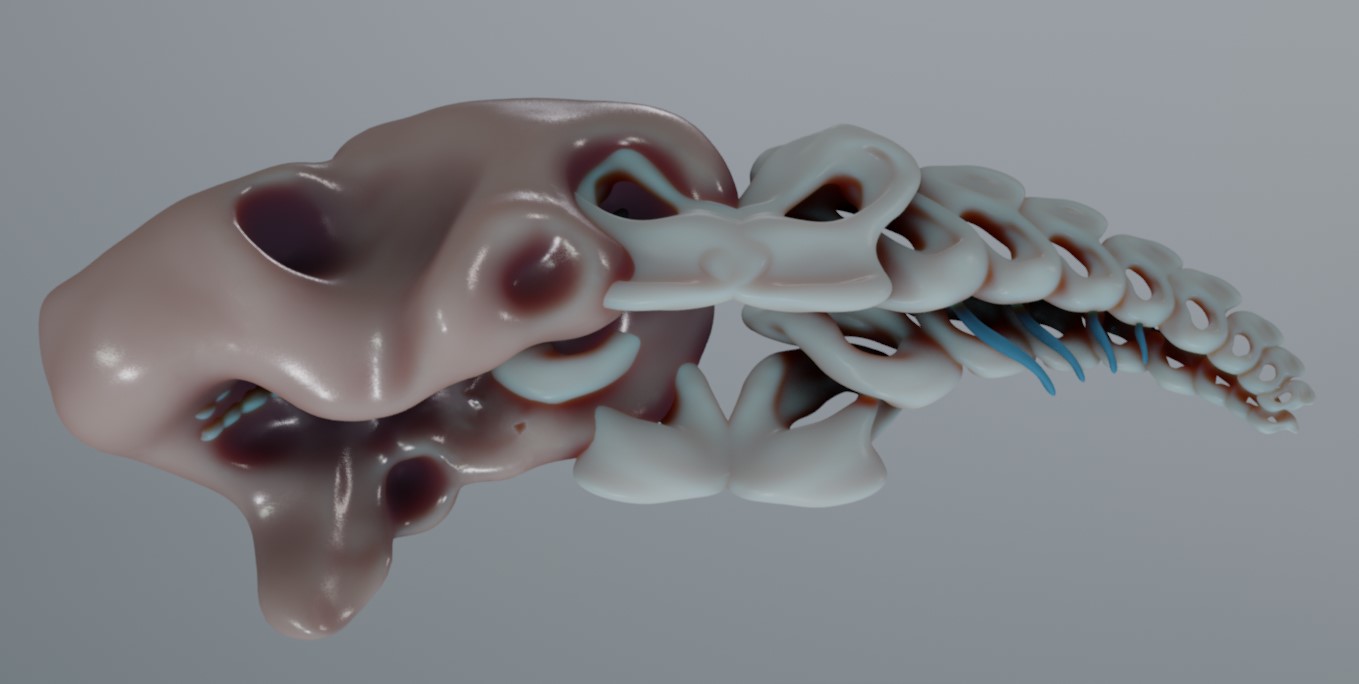
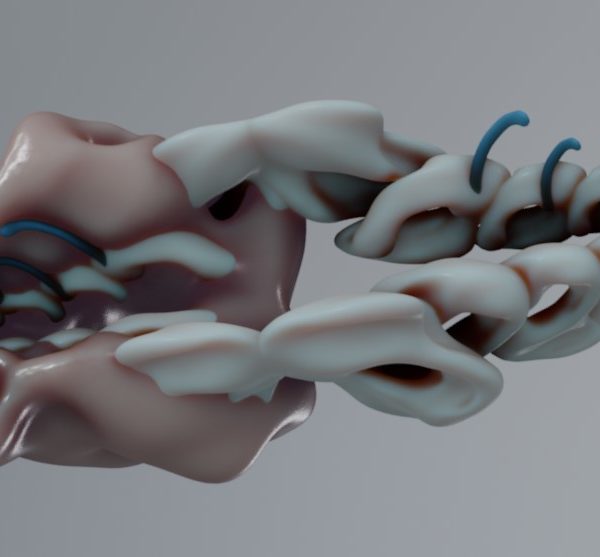
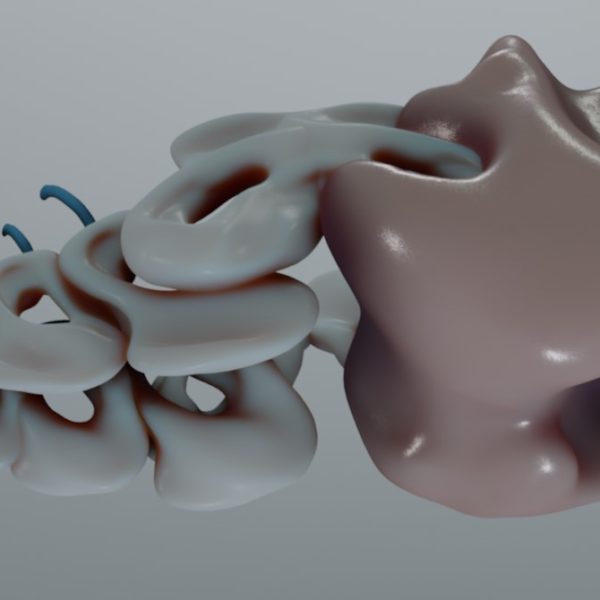
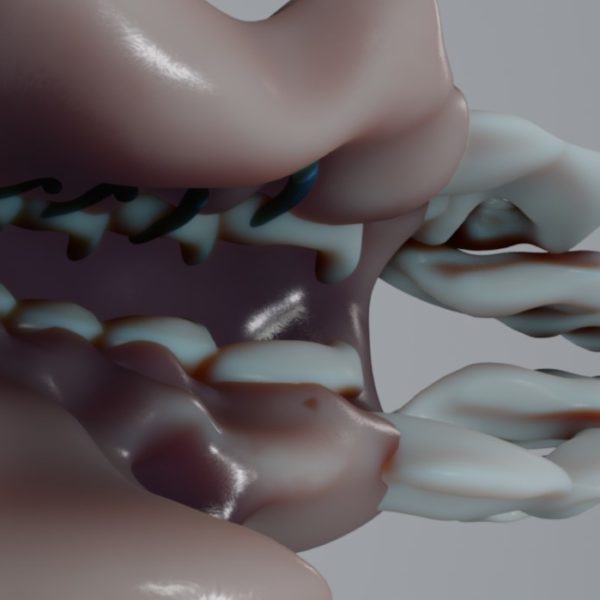
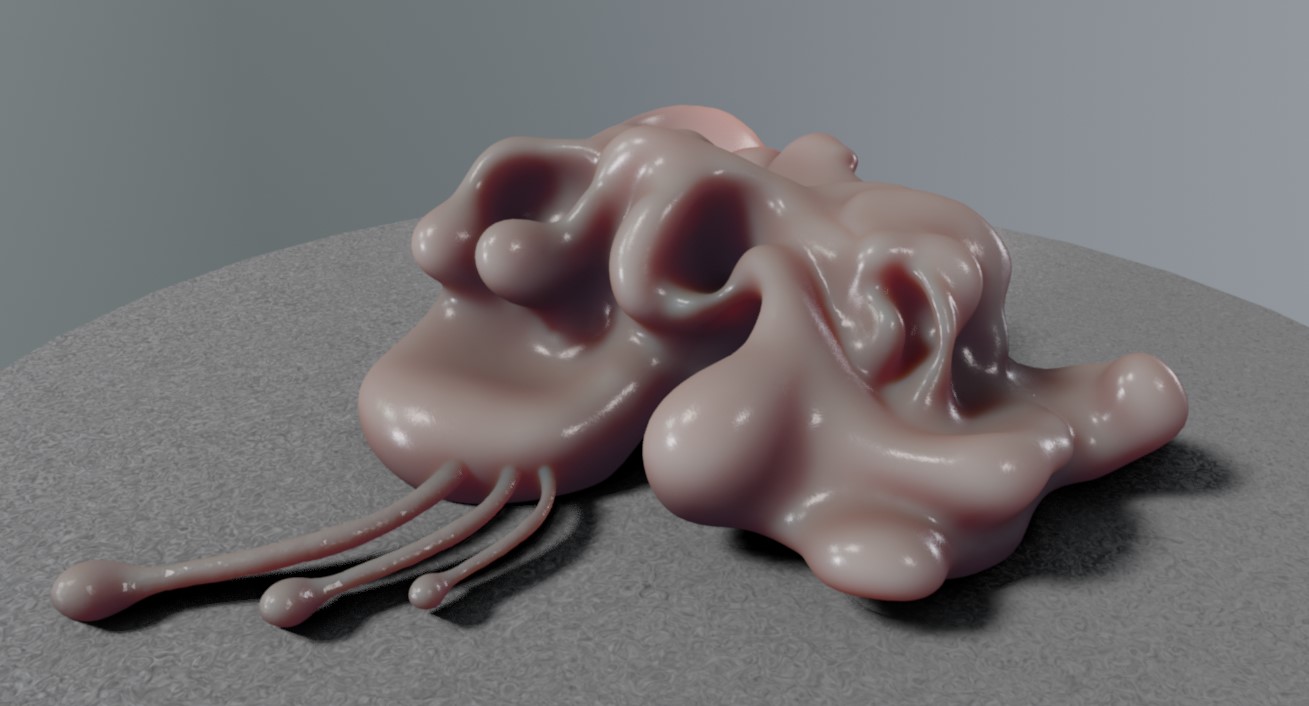
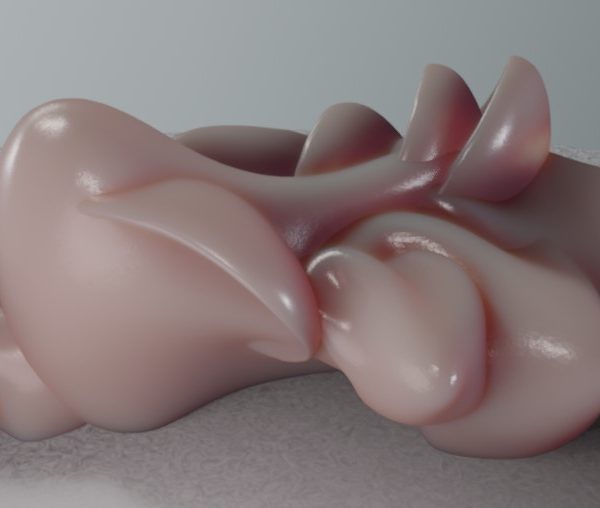
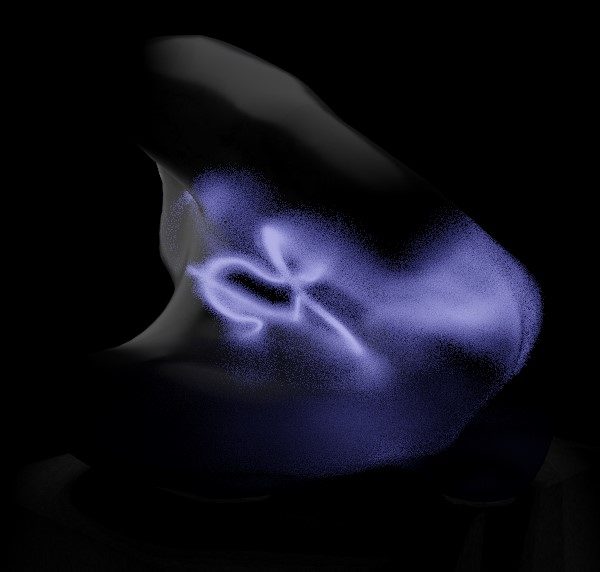
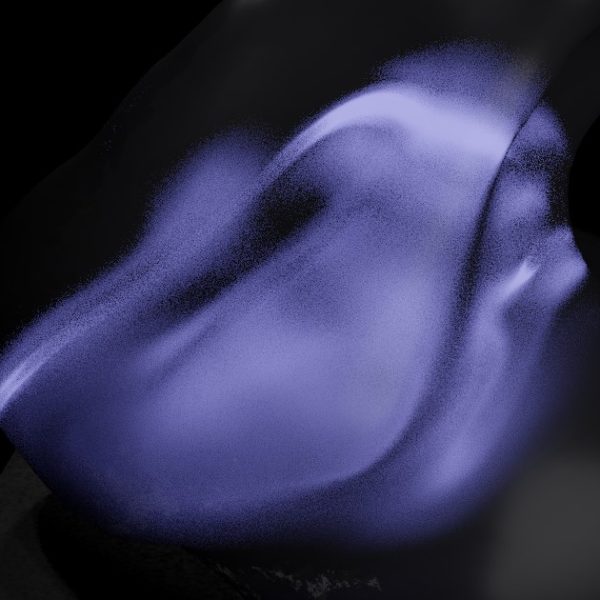
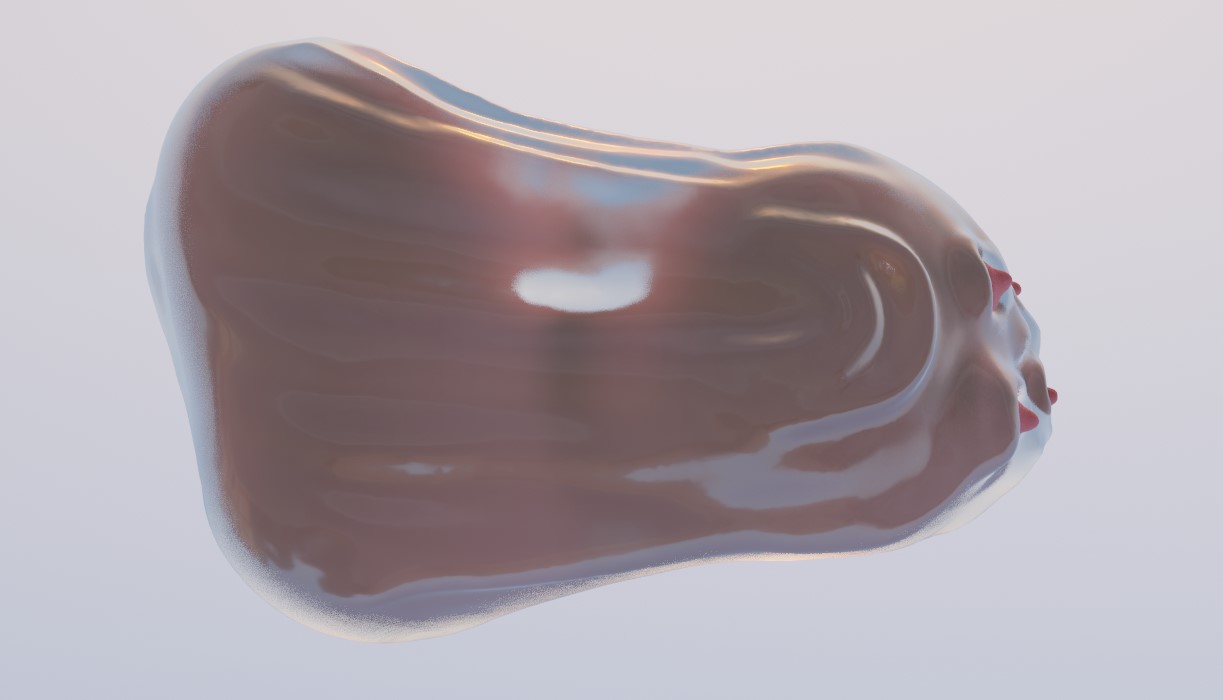
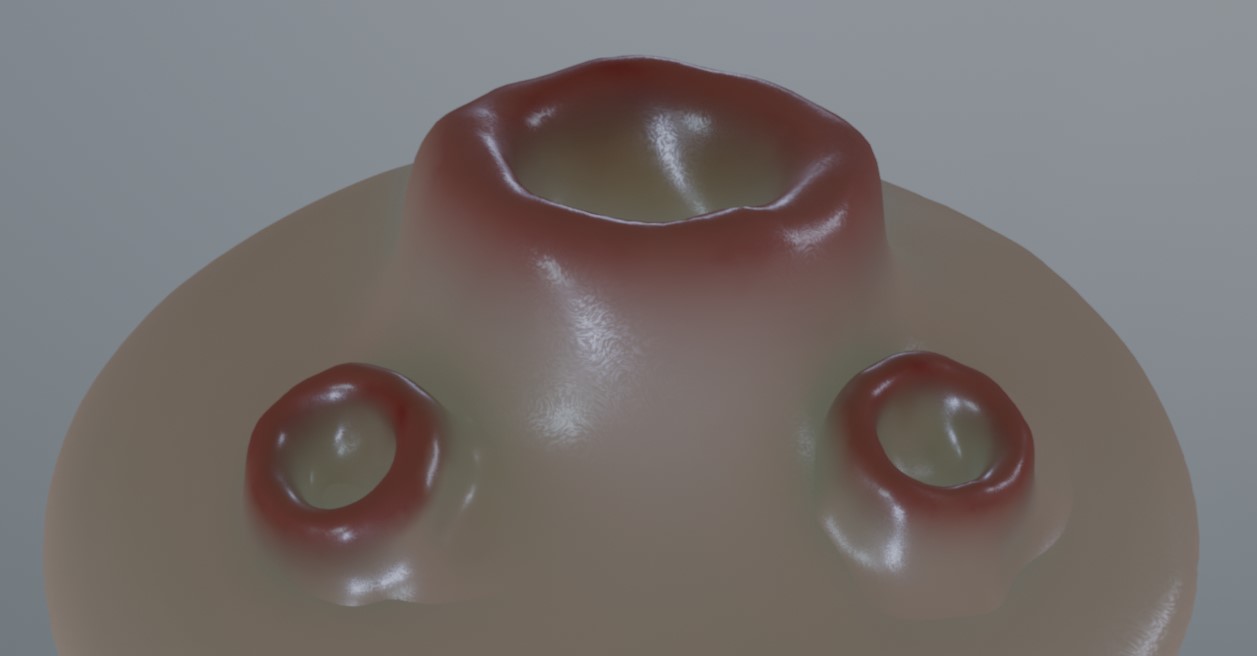
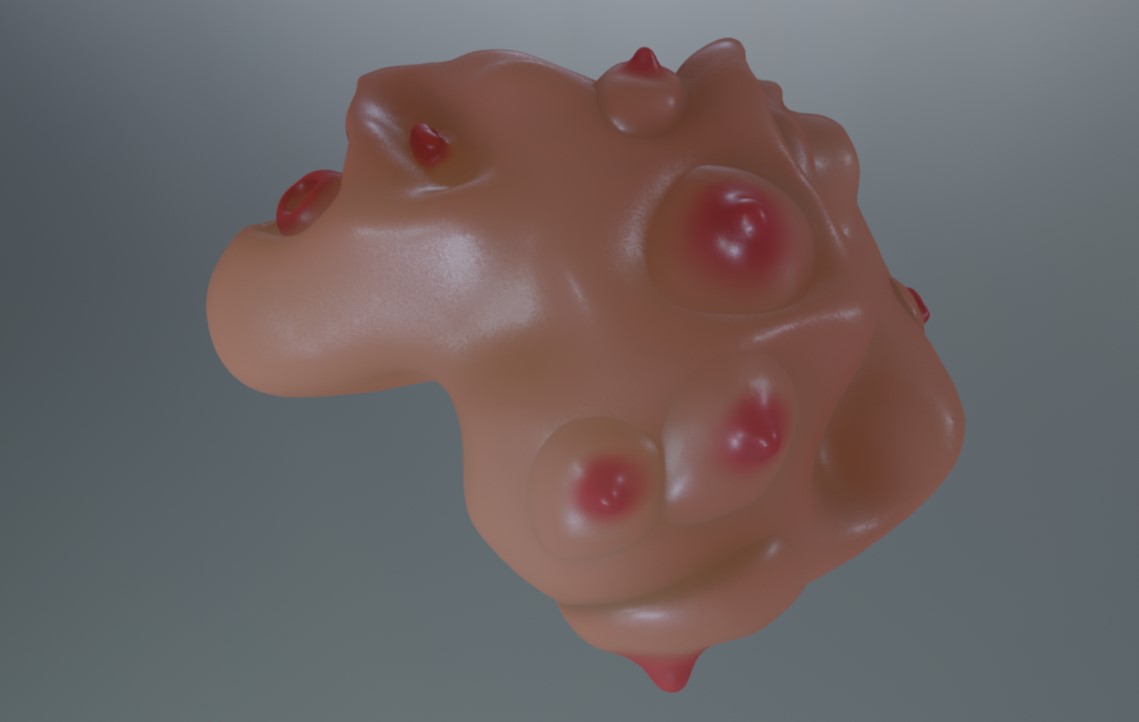
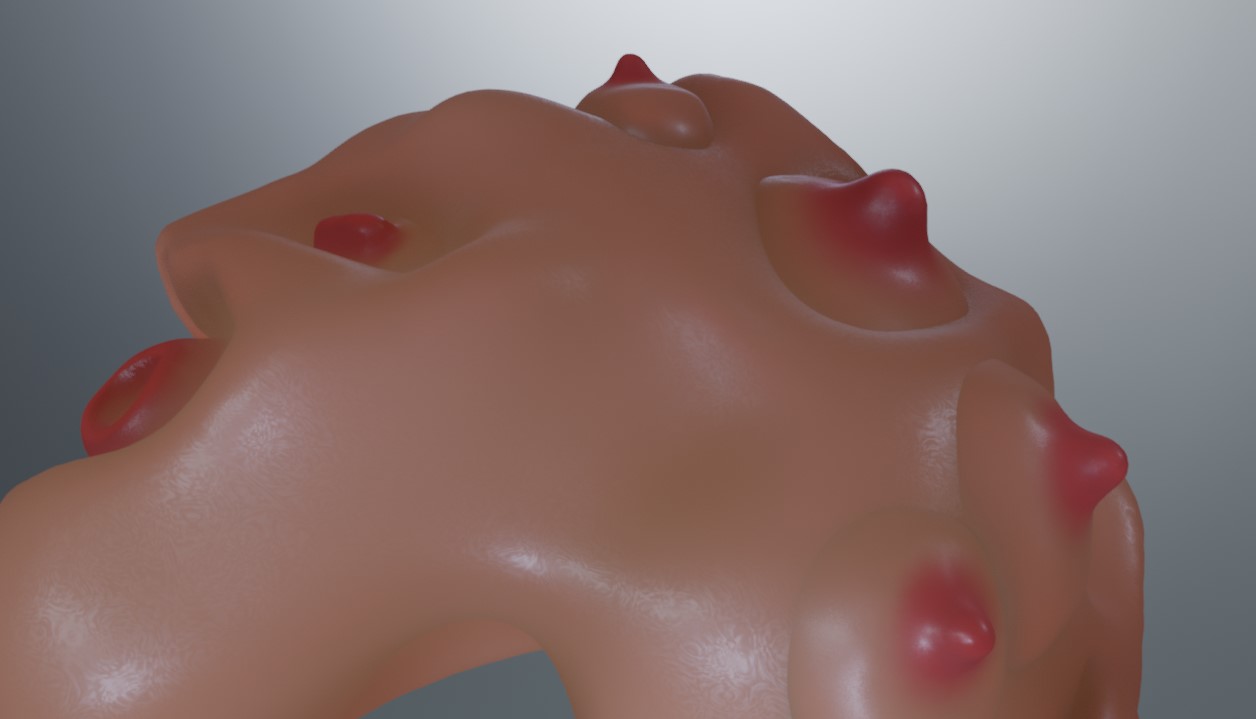
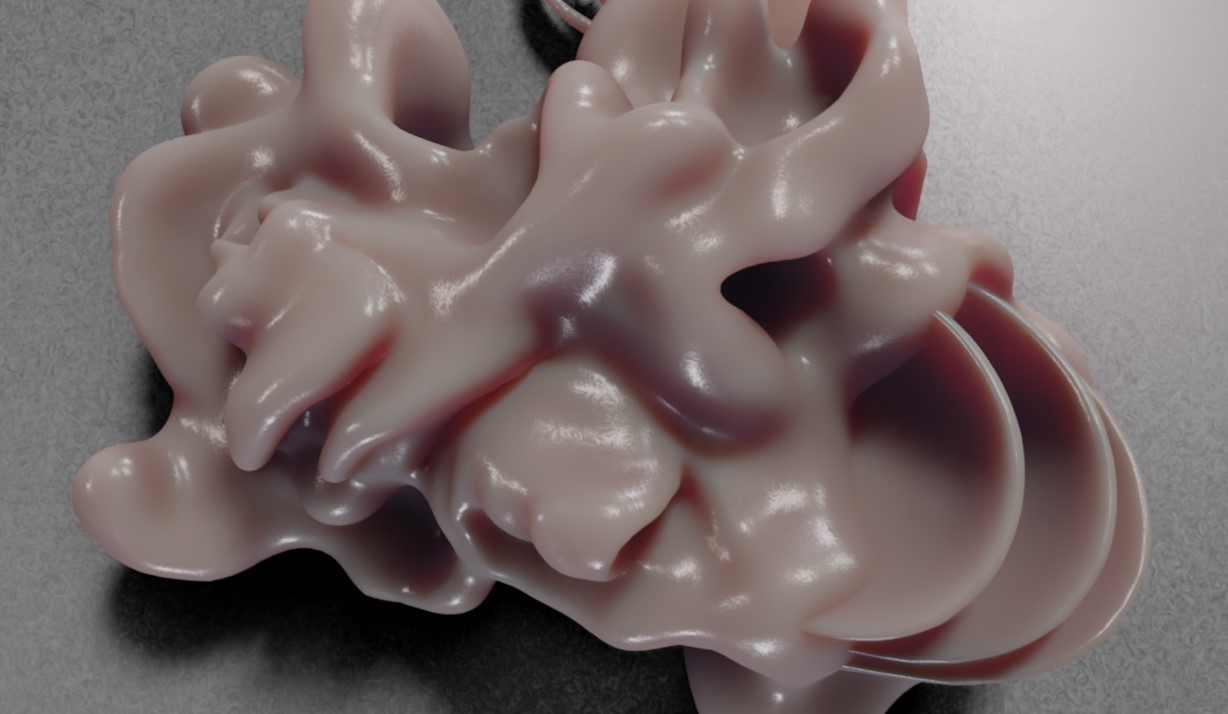
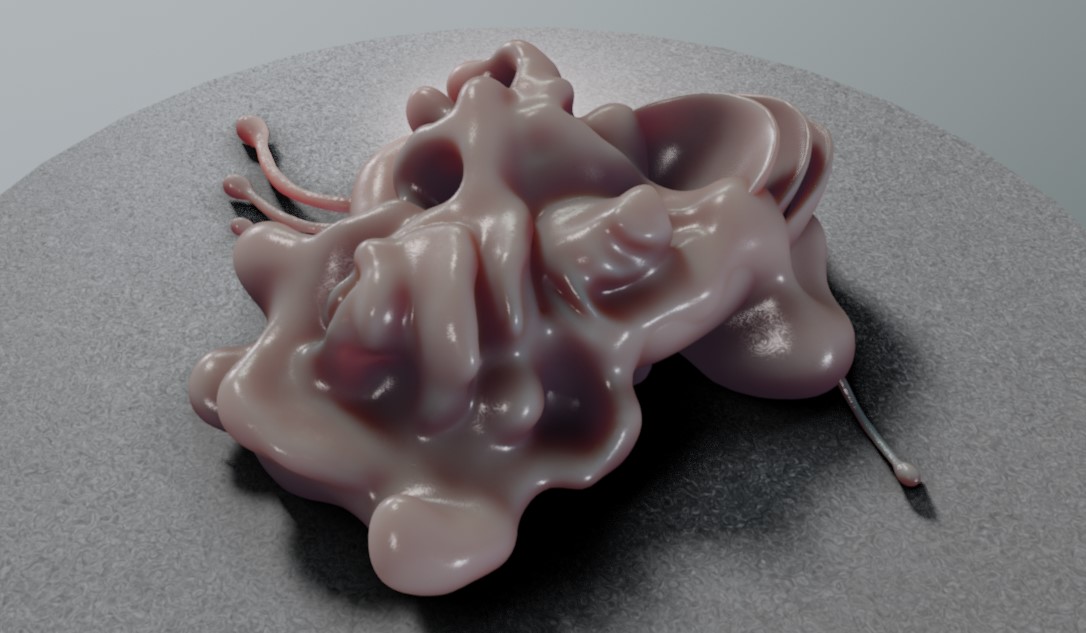
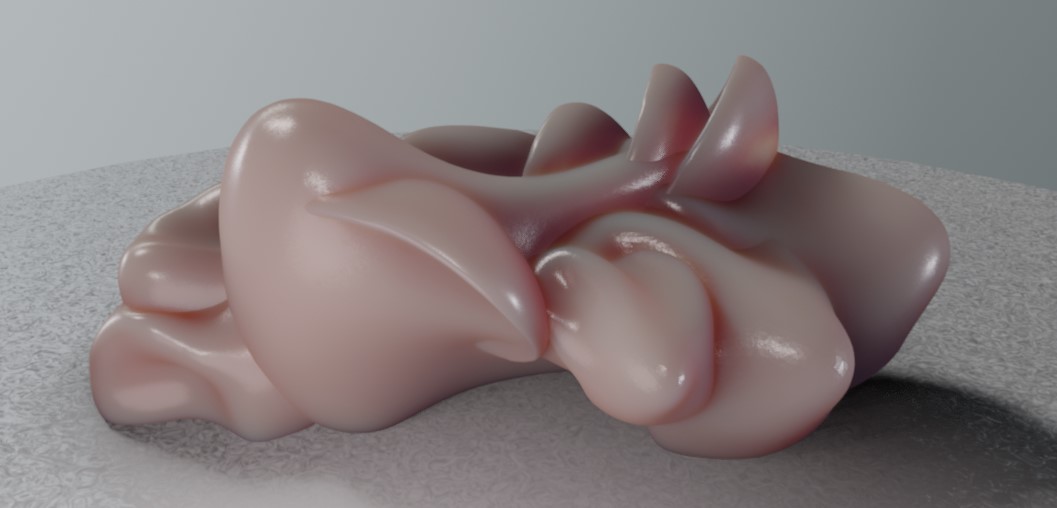
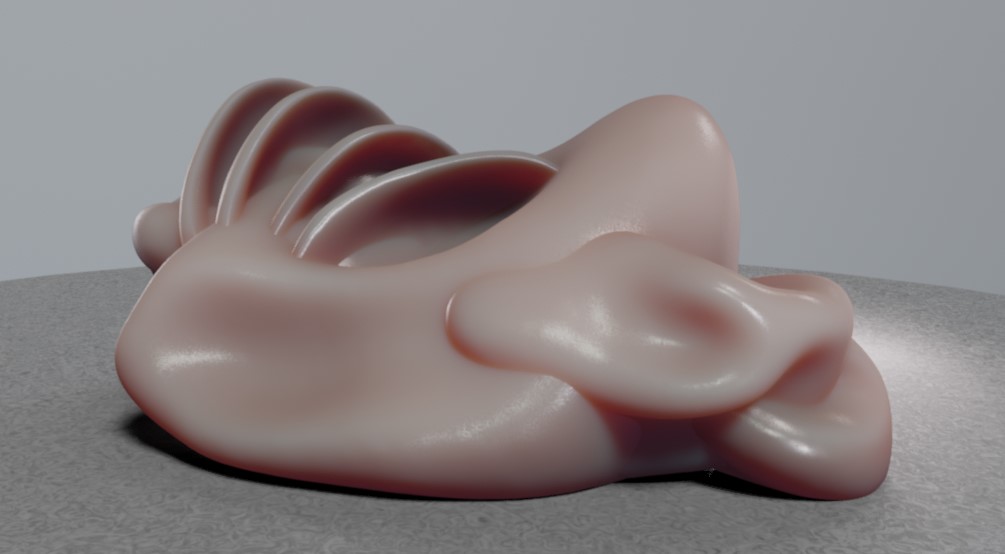
texture and health
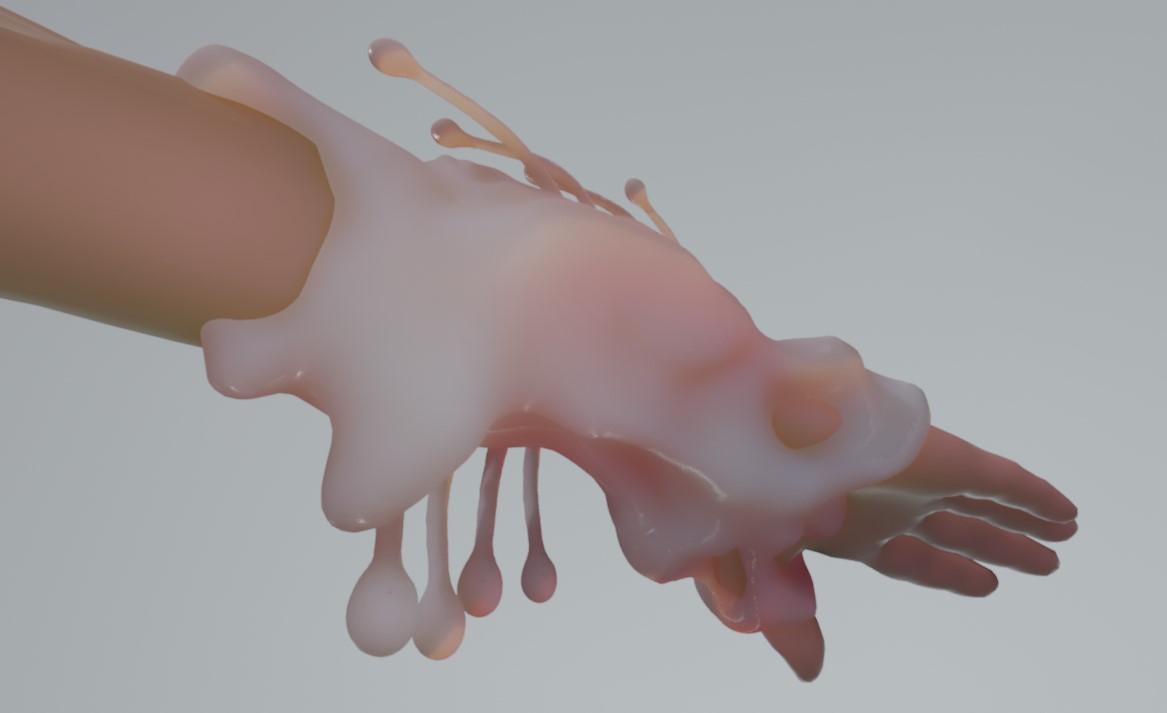
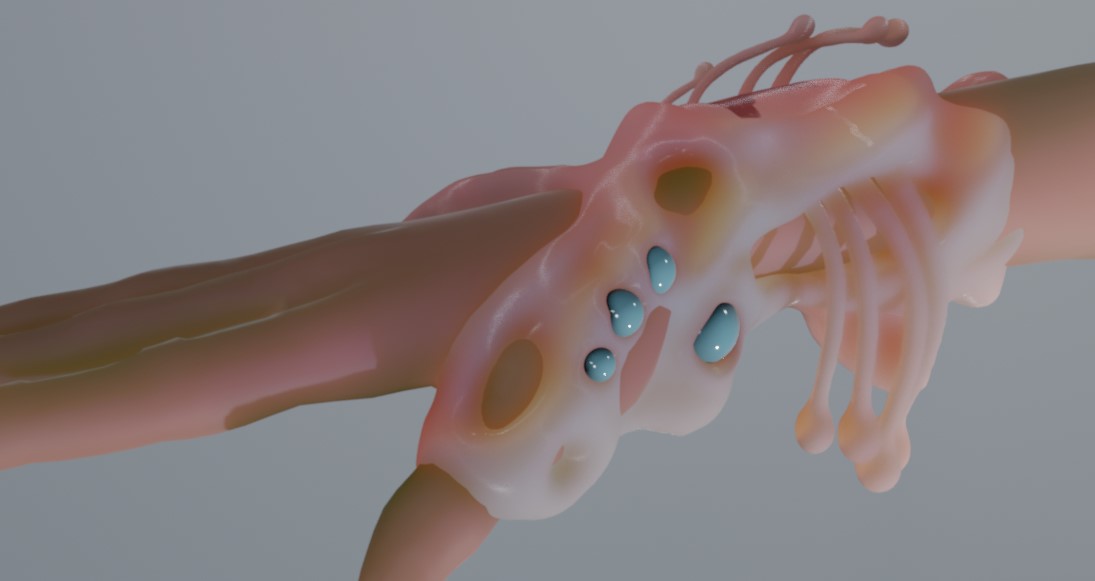
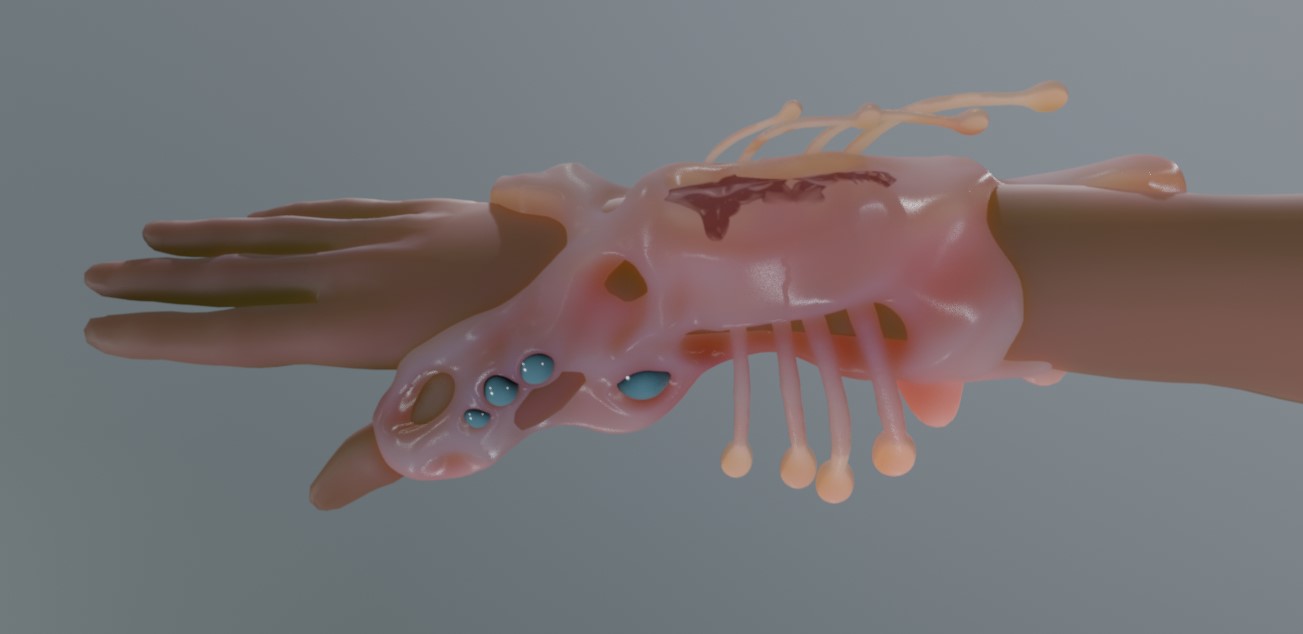
As each organic system is in a constant change of energy and health, this status can be observed right on the morphology and surface of the organ. Variations of health or warmth can be communicated directly throgh the surface patterns and the haptics of the synthetic organ itself.
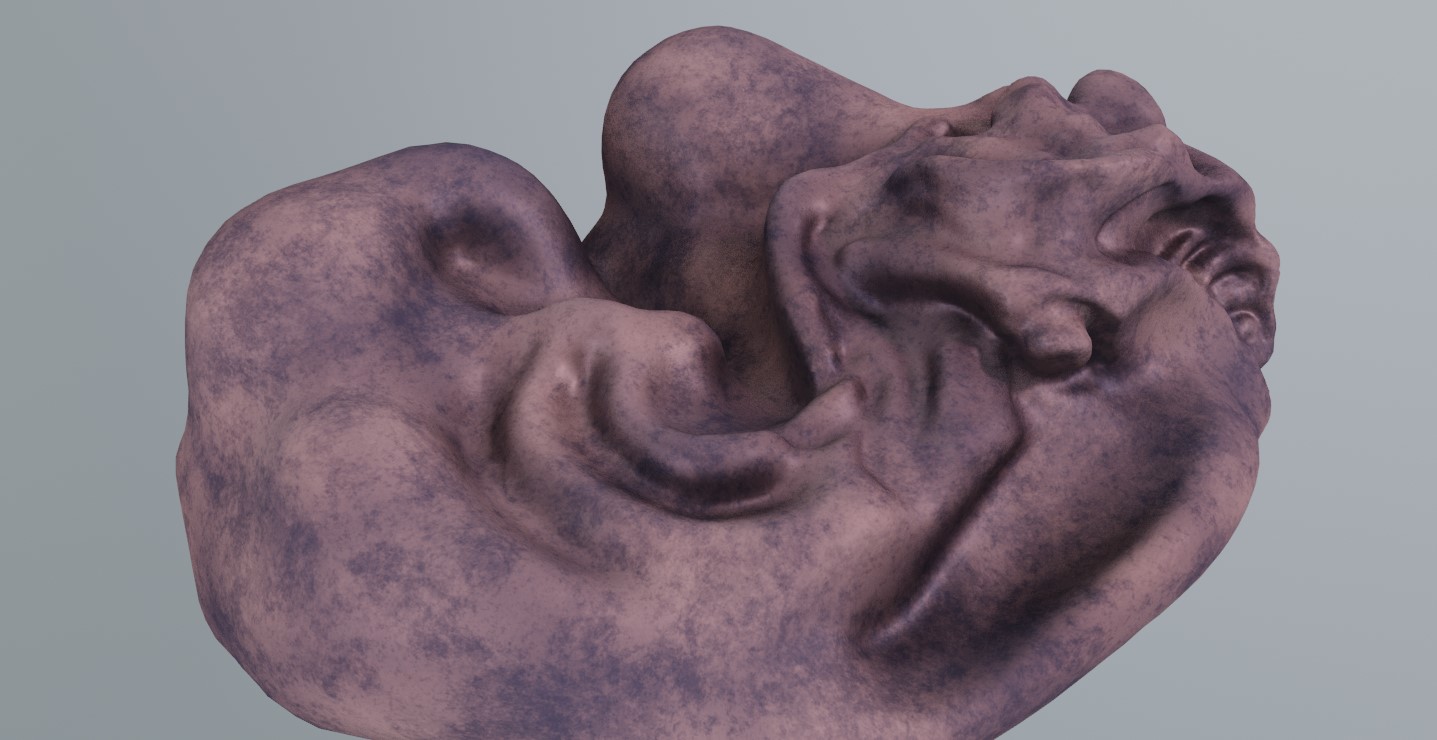
surface and health – sketch one – view 3

surface and health – sketch one – view 2
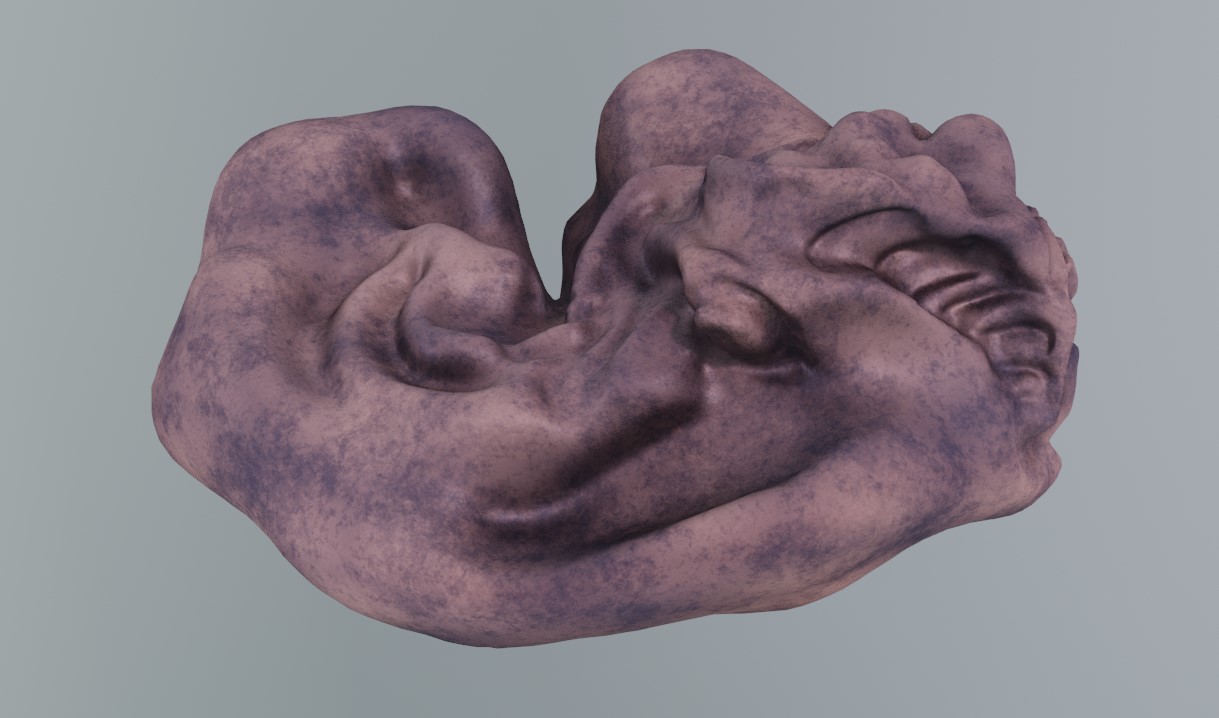
surface and health – sketch one – view 1
With the progressive automation and quantification of our working and living environment through digital tools, the interface between the digital world and our actual body is becoming more relevant. The need lies in the discrepancy that our bodies have a sensory range that is nearly untouched in today’s virtual realities. This circumstance increasingly separates us from reality and not at least, from each other.
With a wink, most of us can already call ourselves cyborgs today, as we are connected to global networks, databases and algorithms through our wearable digital devices. Almost as if these devices have become a necessary part of our body.
The work EXO:ORGAN is an artistic vision in which this relationship between our human body and the digital world is further drawn in a more eccentric way. Inspired by the idea of an external organ or an exoskeleton that organically, biologically expands our body into the digital world in various sensual ways.
Since birth, growth, decay and death are a crucial part of our concept of life, these devices were designed with this idea in mind. As a consequence, all materials used must be of a biological nature or at least be sustainably decomposable. Electronic circuits and calculations focus on energy efficiency, low power harvesting, modularity and alternative conductive materials. Although this sounds utopian, most of this technology is already available. EXO:ORGAN is an artistic attempt to put an optimistic, human-centered utopian narrative up for discussion.
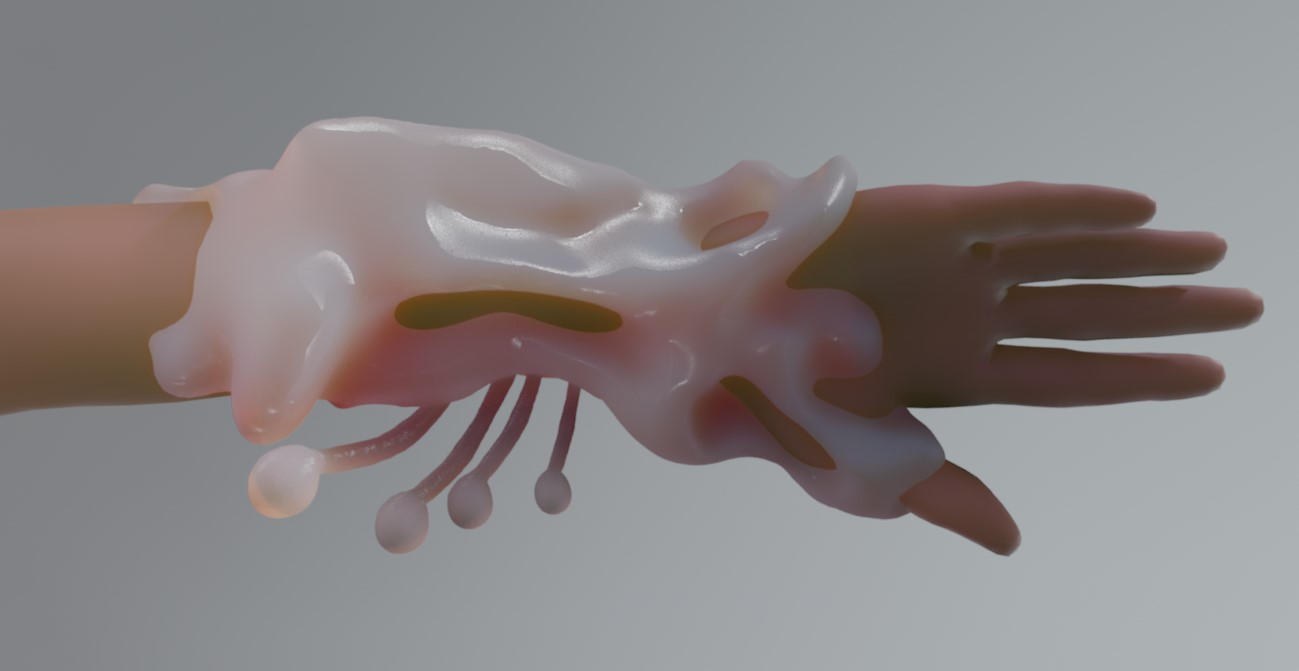
skin, hulls – the inner and outer
hully I – two component user interface
-

-
-
The distinction between inner and outer can be observed widely in the world of living beeings. The need for protection and inter/exchange of matter between internal processes and the outer world is mainly the epidemis use. What can we learn from this idea in respect to the world of digital interaction?
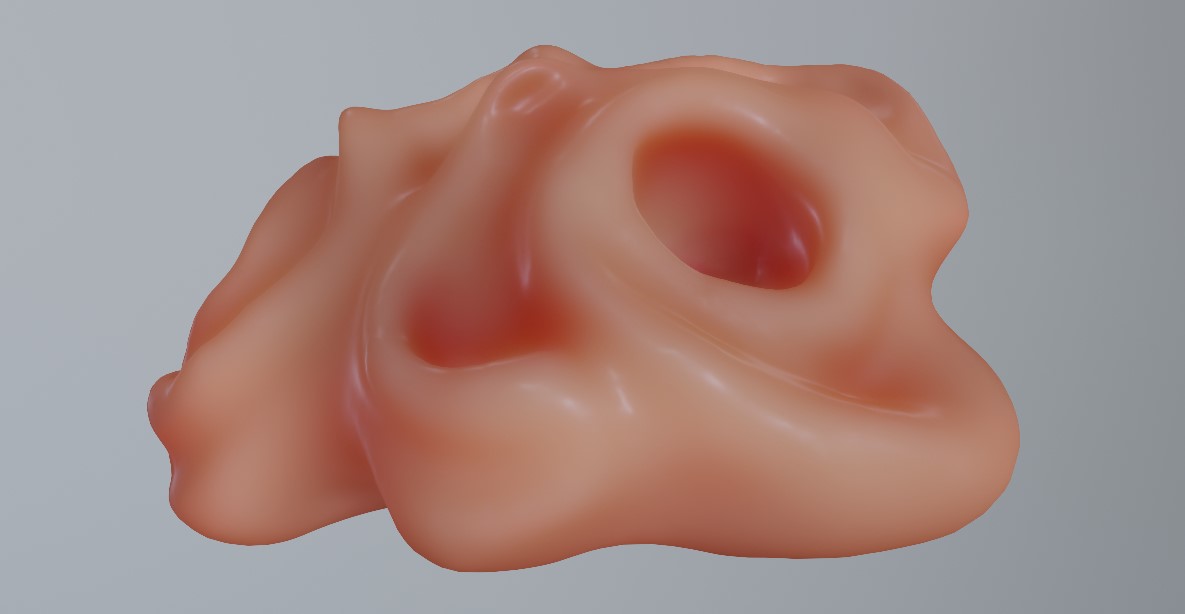
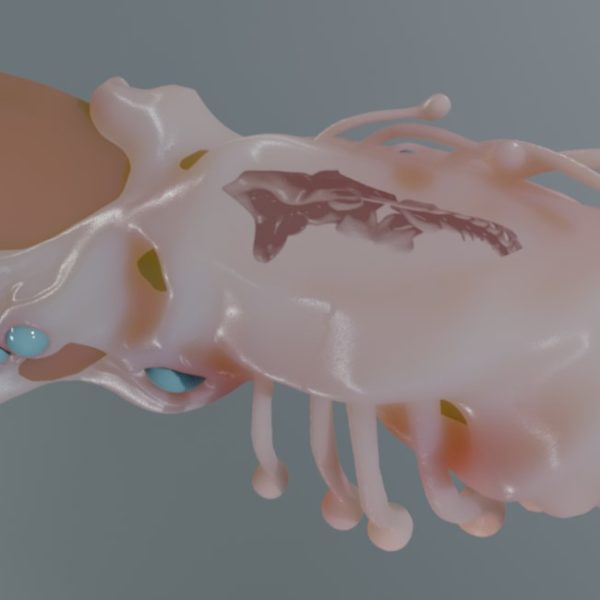
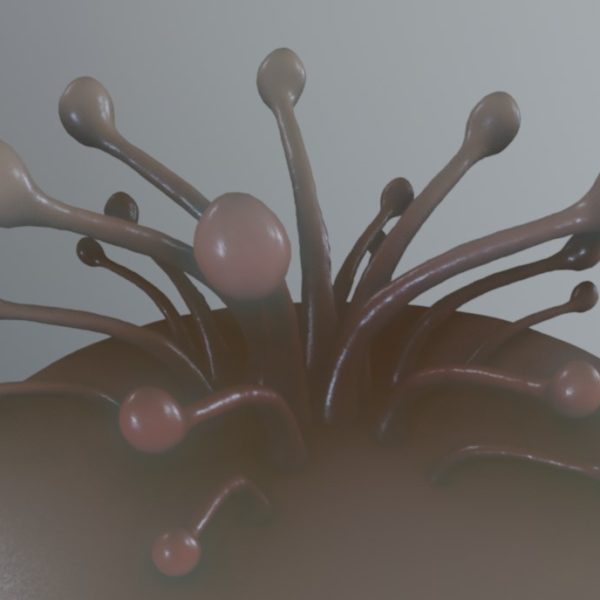
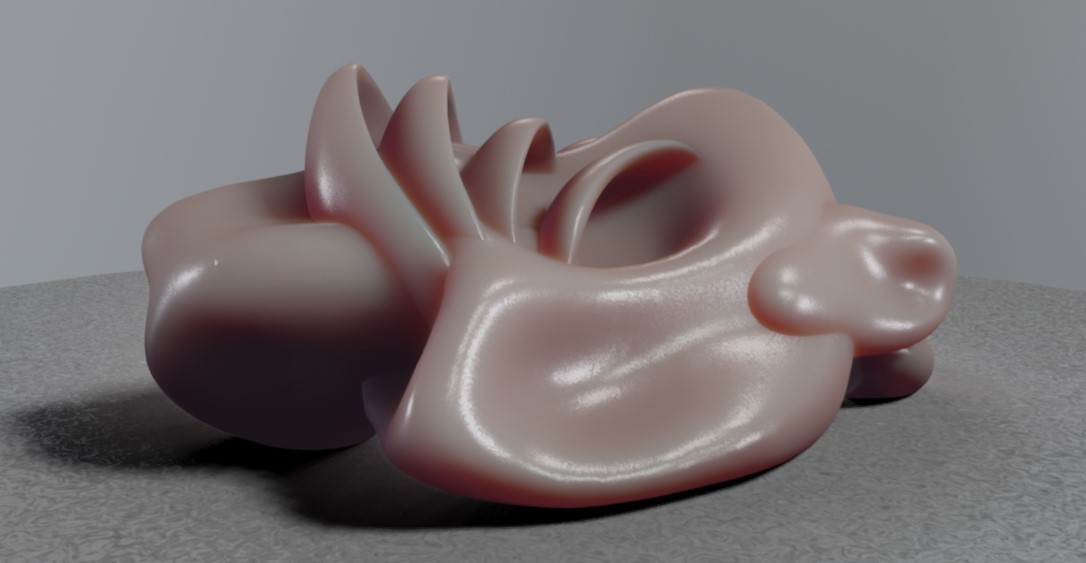
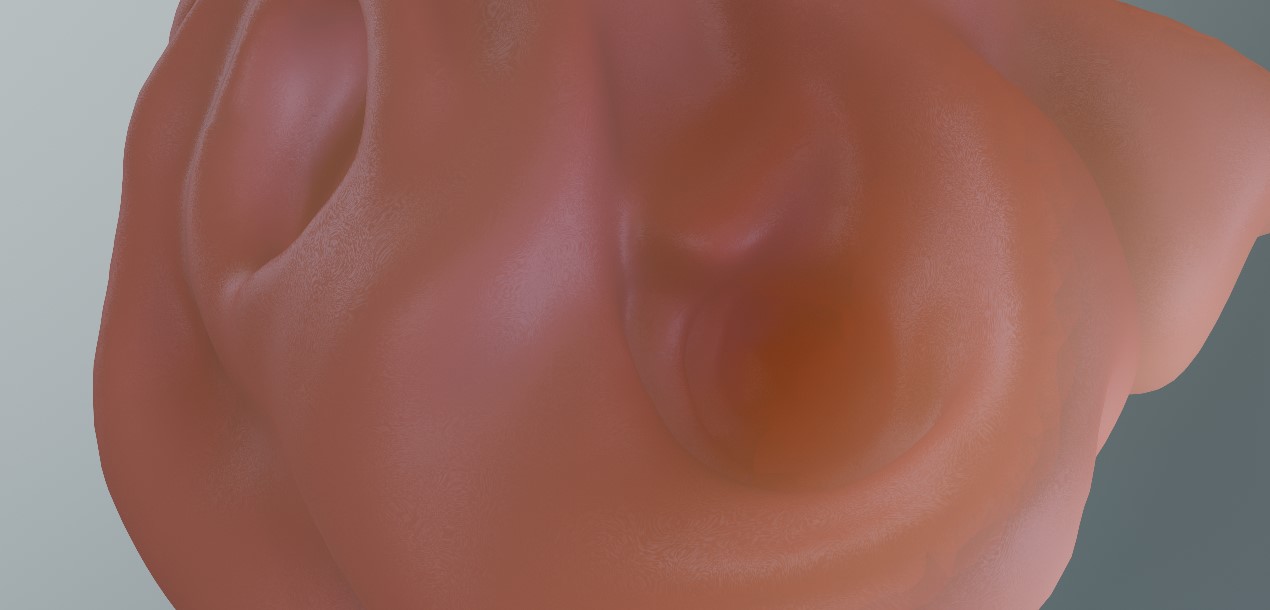
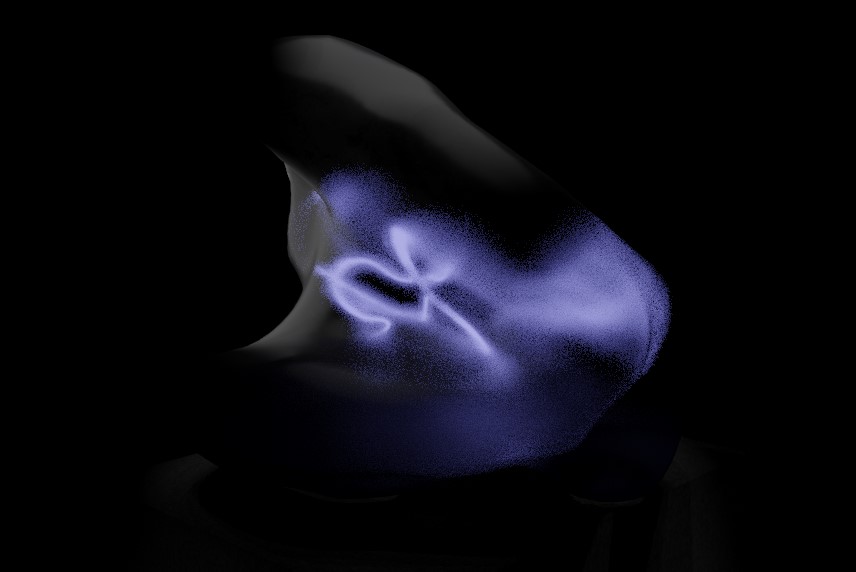
surface studies, interfacing through haptics
The haptics of a surface is simply one component of a broad tactile experience we are capable to have with our only hands – calling the elasticify of the object, it’s plasticity, its temperature, the moistness and slipperyness of the surface, which is defined by the material used. The utilization of progressive shapes, inspired by nature, like lamellae, dentrides, bumps, groves or holes can extend this experience even further. The following sketches show possible scenarios of this idea.
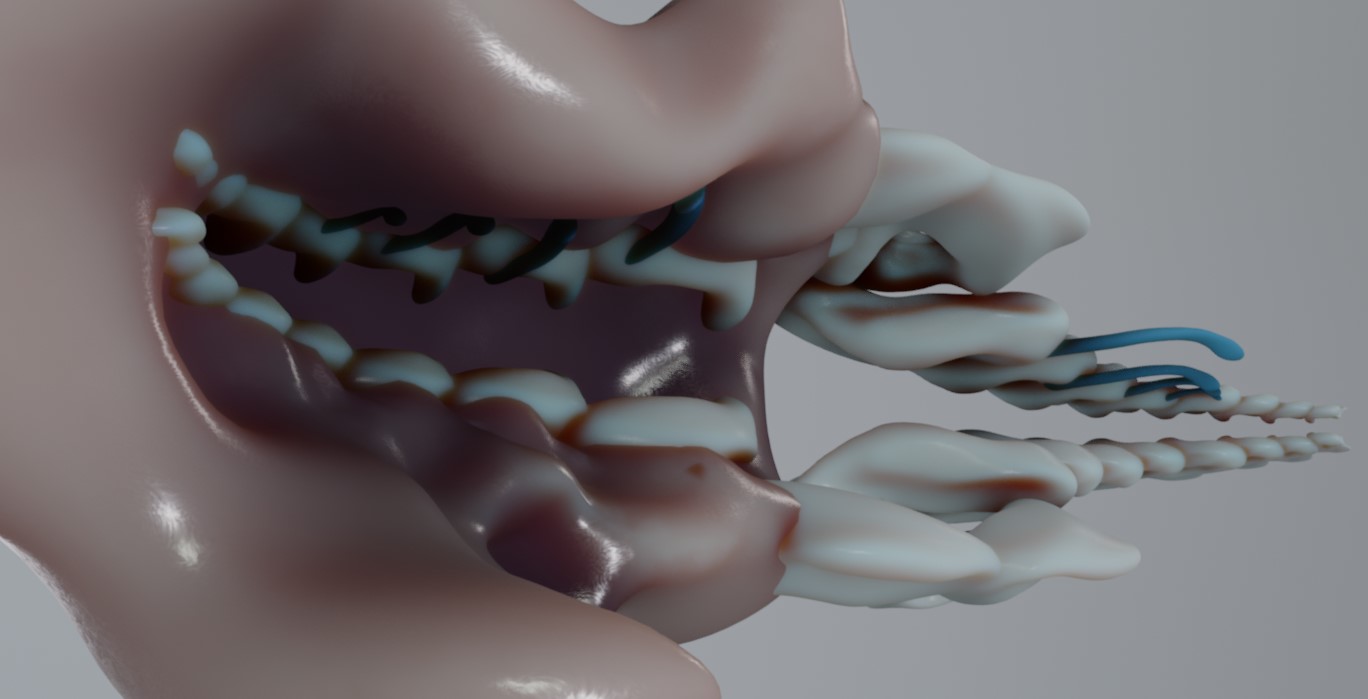
holes and nibbler – sketch of flexible interface within the volume
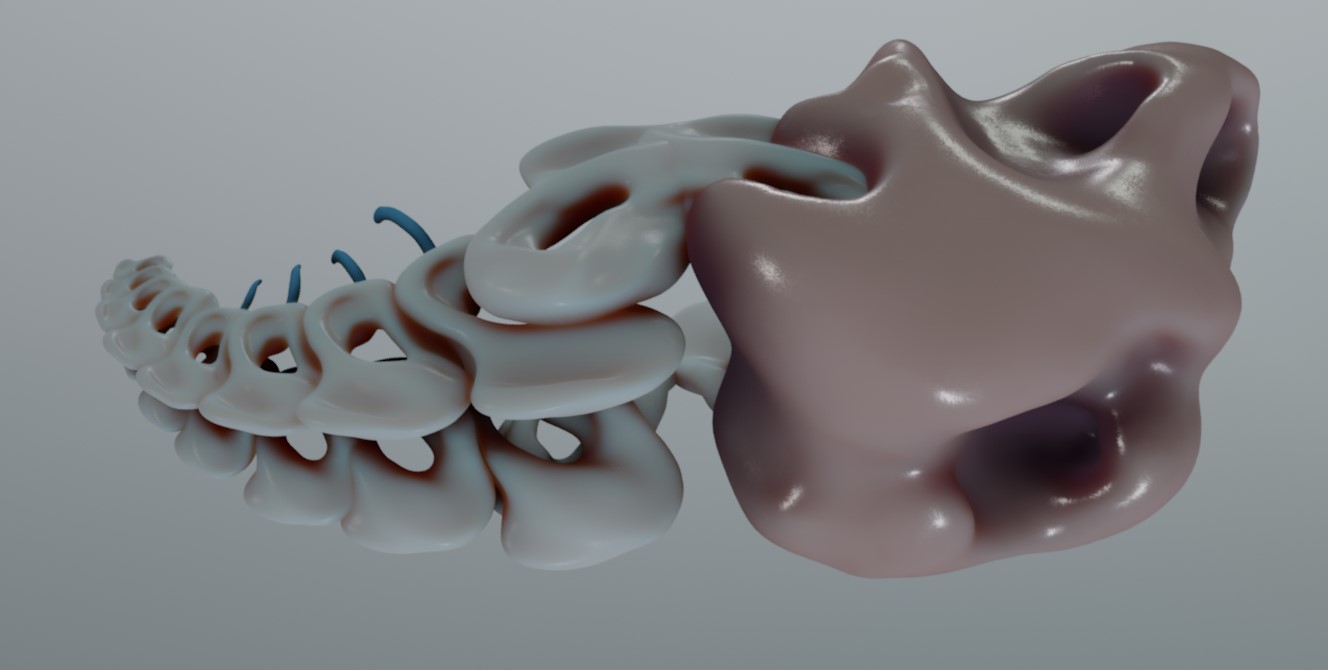
As synthetic forms mimik the shapes of our bodies, we immediately get an idea of its haptics, it’s behaviour in motion and possible sensitive areas : as we create associations with areas like the inner ear, the mouth, nose or eye. Underlying bone and muscle structure is therefore not concious, but a crutial part of the reception, what part might be moveable and which not.
-

-

-
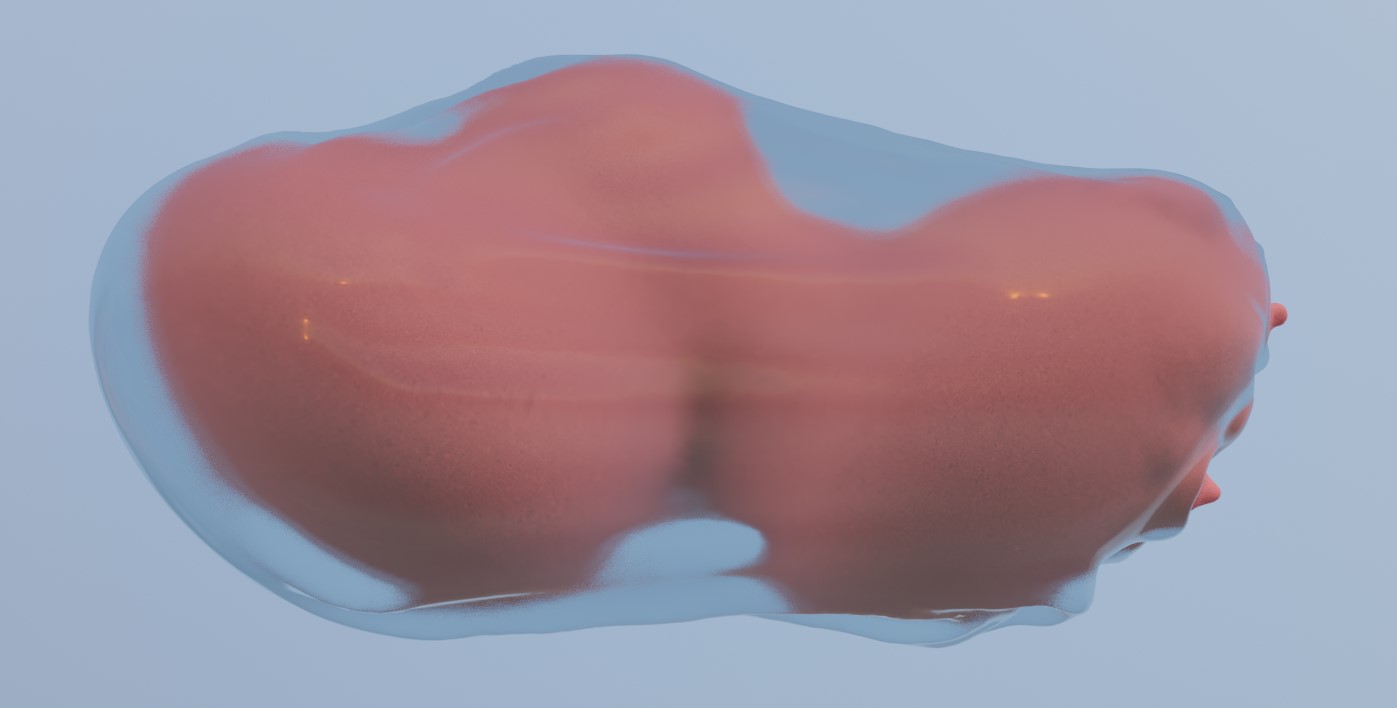
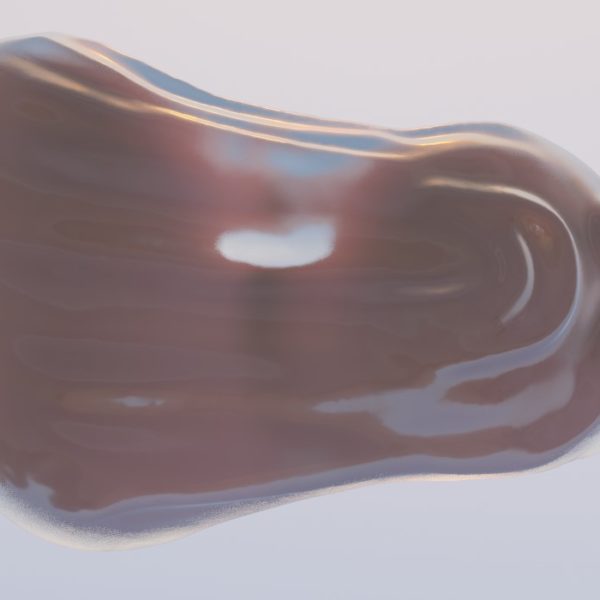
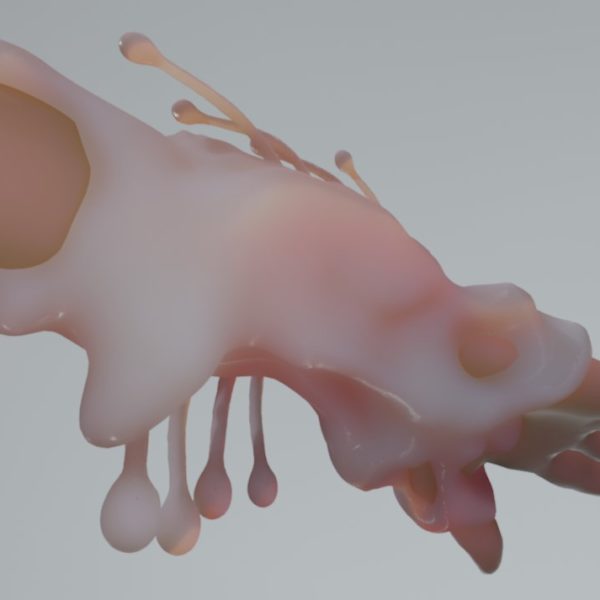
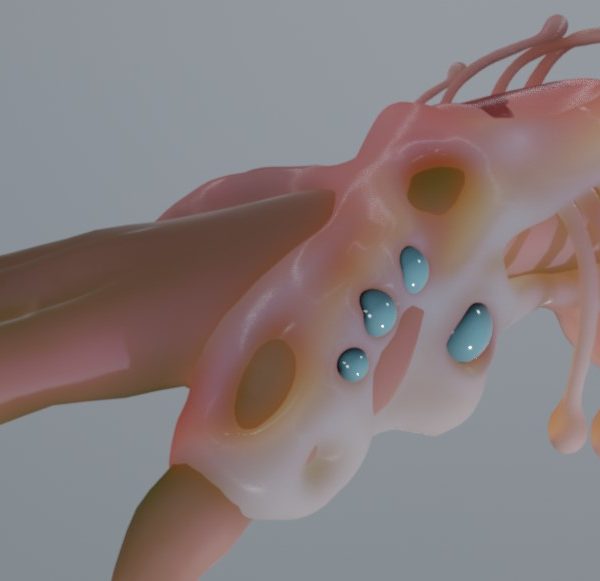
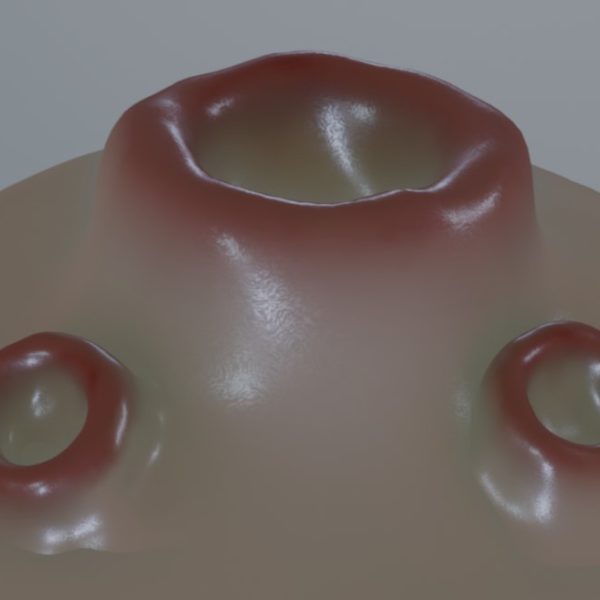
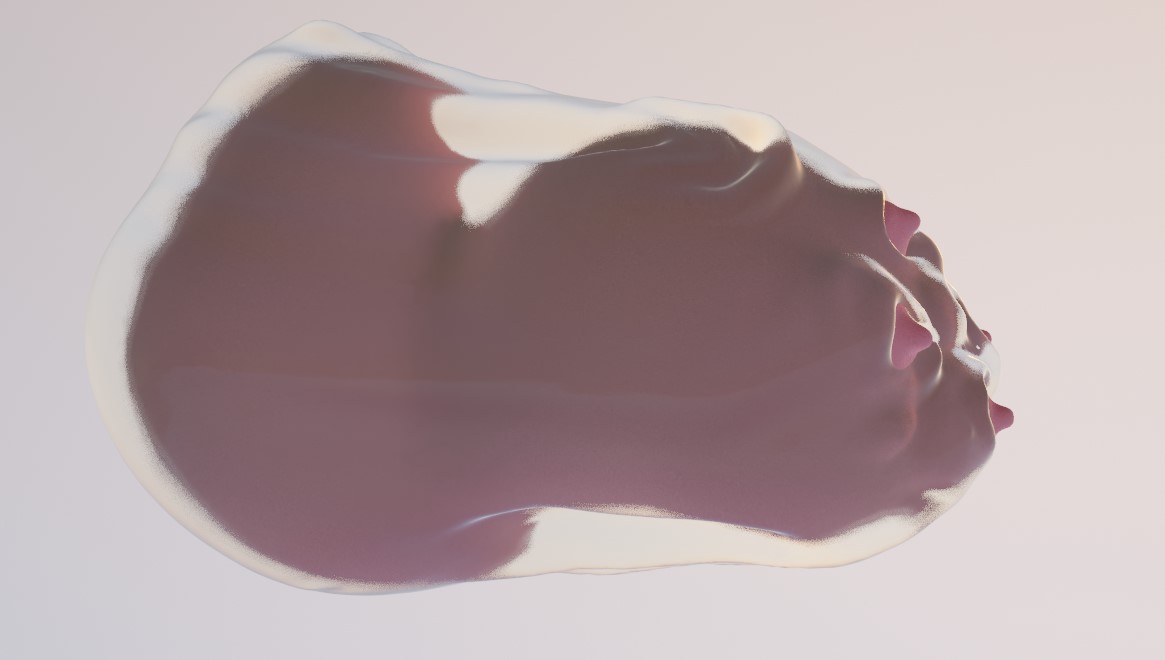
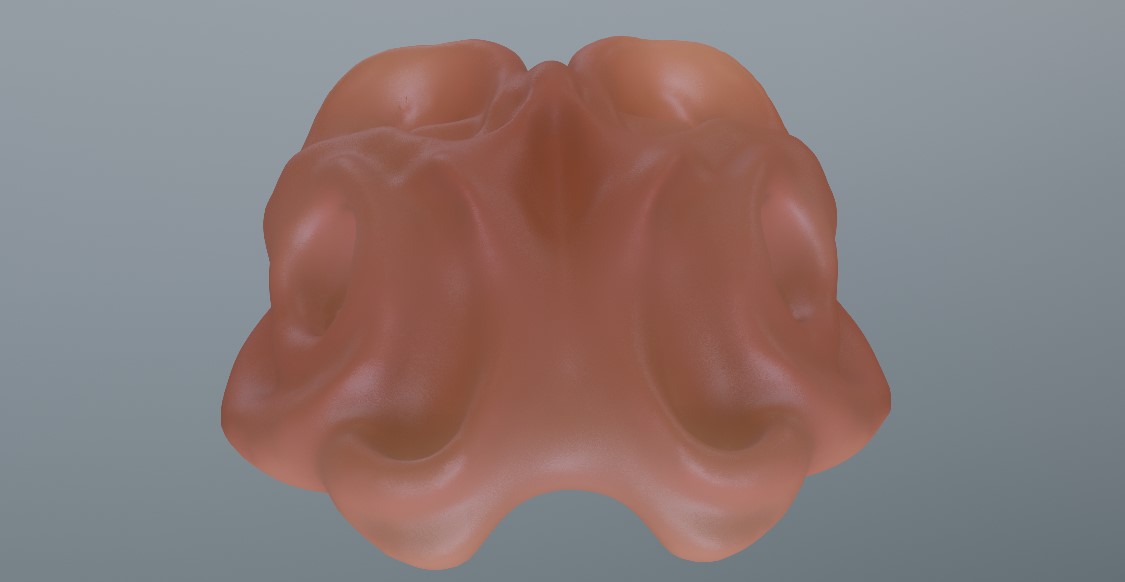
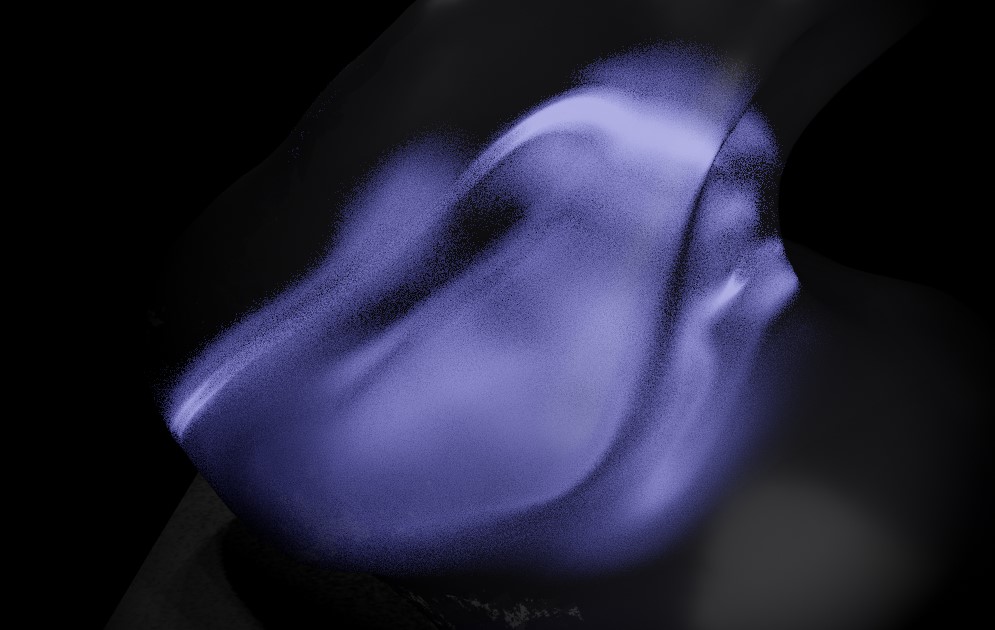
wet or dry!
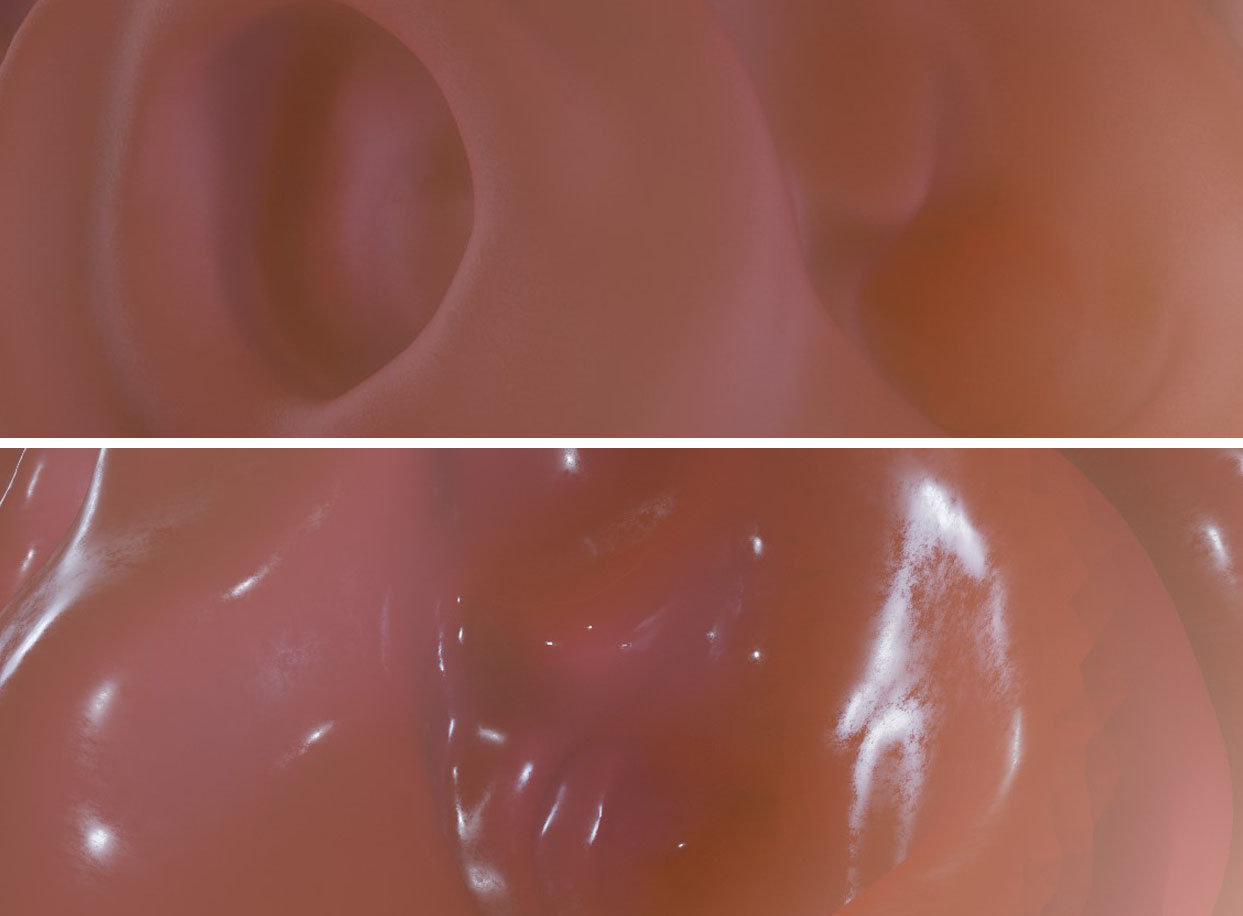
wet vs. dry study – moisture and slippery of the surface
Speaking of wetware – the properties of the surface can become another layer for information. As areas of out bodies are wet, they can be defined as special interfaces between inner and outer body – therefore these areas are very sensitive.
TODO !
#1 Hot/cold
#2 inner hohlräume > different bending pressure behaviour!
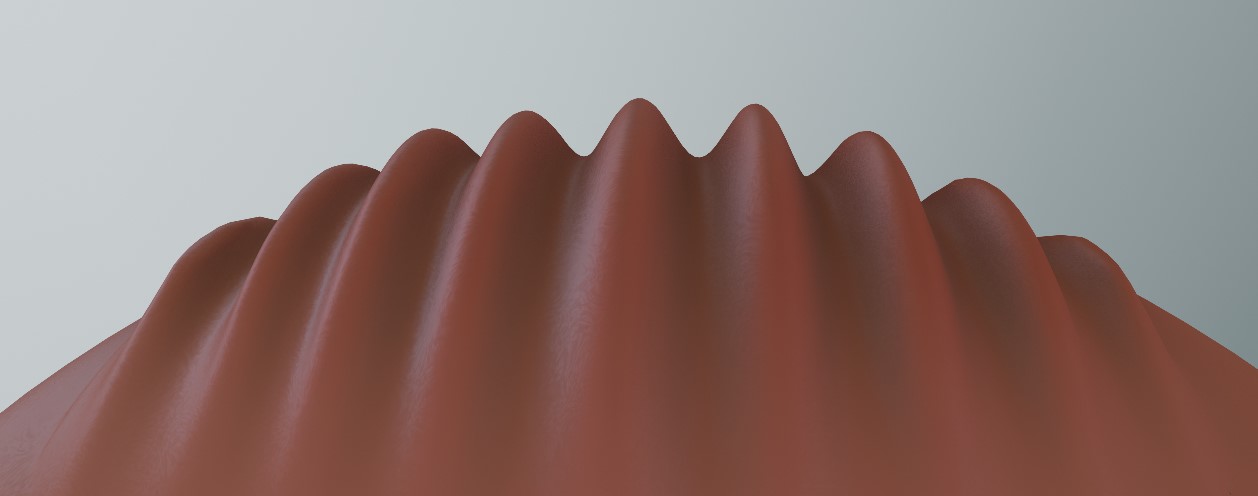
lamellea flat version
lamellea flat version – those flexible lamellea can be stroked or deformed by the finger. The amorph structure gives a nonvisual feeback of orientation due lamellae scale difference

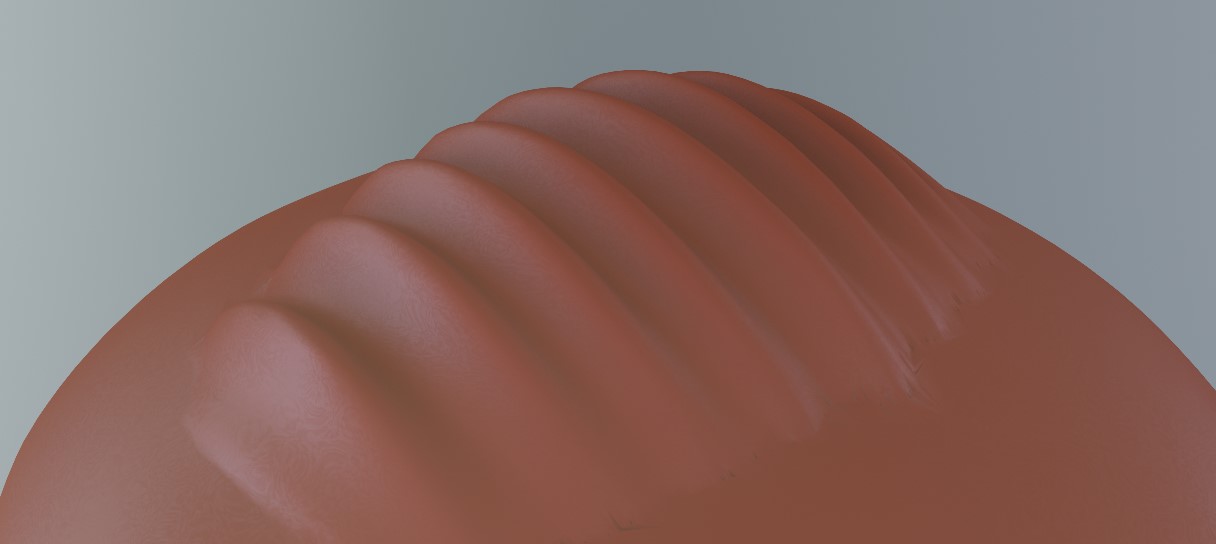
lamellea distinctive version
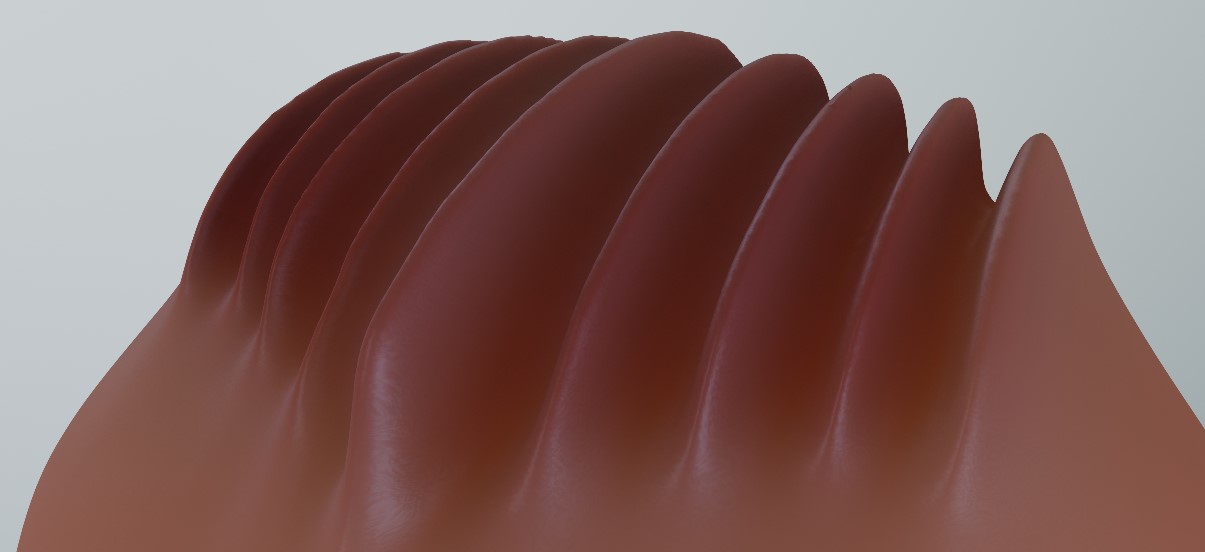
lamellea distinctive version
lamellea distinctive illuminated version – integrated LED light is a obvious enhancement for any interaction scenario
integrated electronic ink & experimental hand device

EXO:ORGAN – sketch V
-

-
-
-
-

experimental soft interaction elements
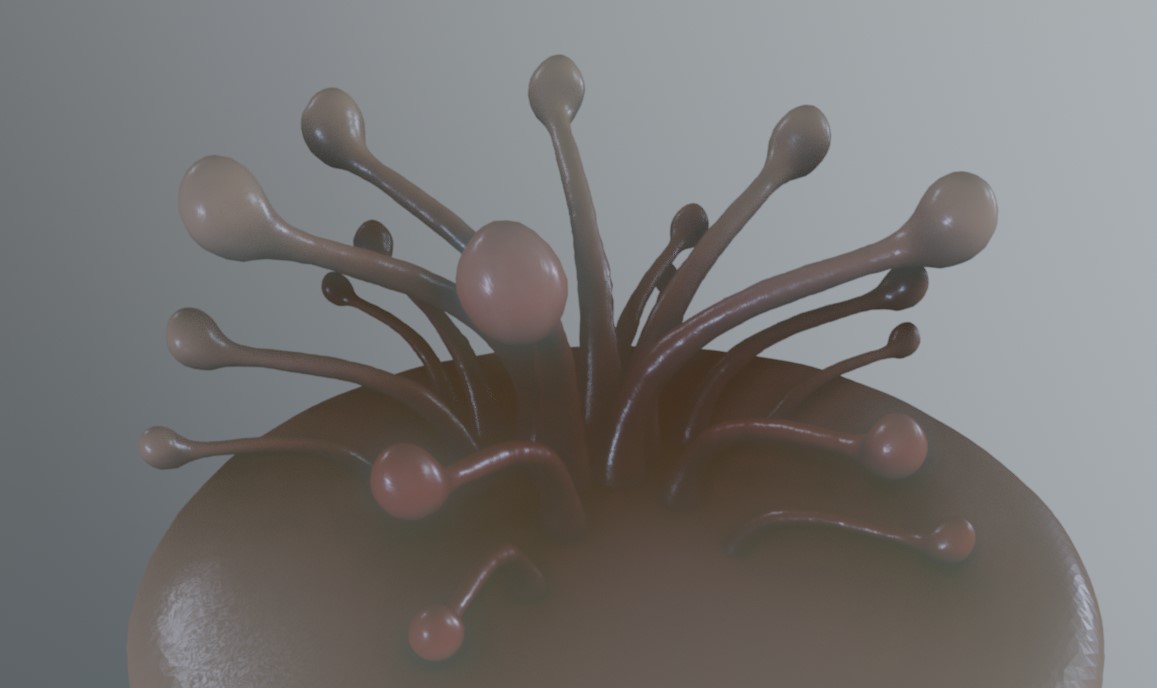
Common user interface design the the digital world is widely based on stiff materials like plastics, glass or metal. Fabric, silicone or bio materials offer different challenges and opportunities compared to conventional, well know user interactions. This series attempts to discover possible sensory and tactile „sensors“ and modules besides the button we know 🙂
NIBBLER – this interface is obvioulsy refering to the nipple, as we know it as a very sensitive part of out body surface – this might work as multidimensional joystick both directional and pressurewise
-
-

-
Sensors or interaction elements reveal their potential only when applied to a specific shape and use. Therefore this device migth describe a pressure sensitive device for both hand and finger interaction.
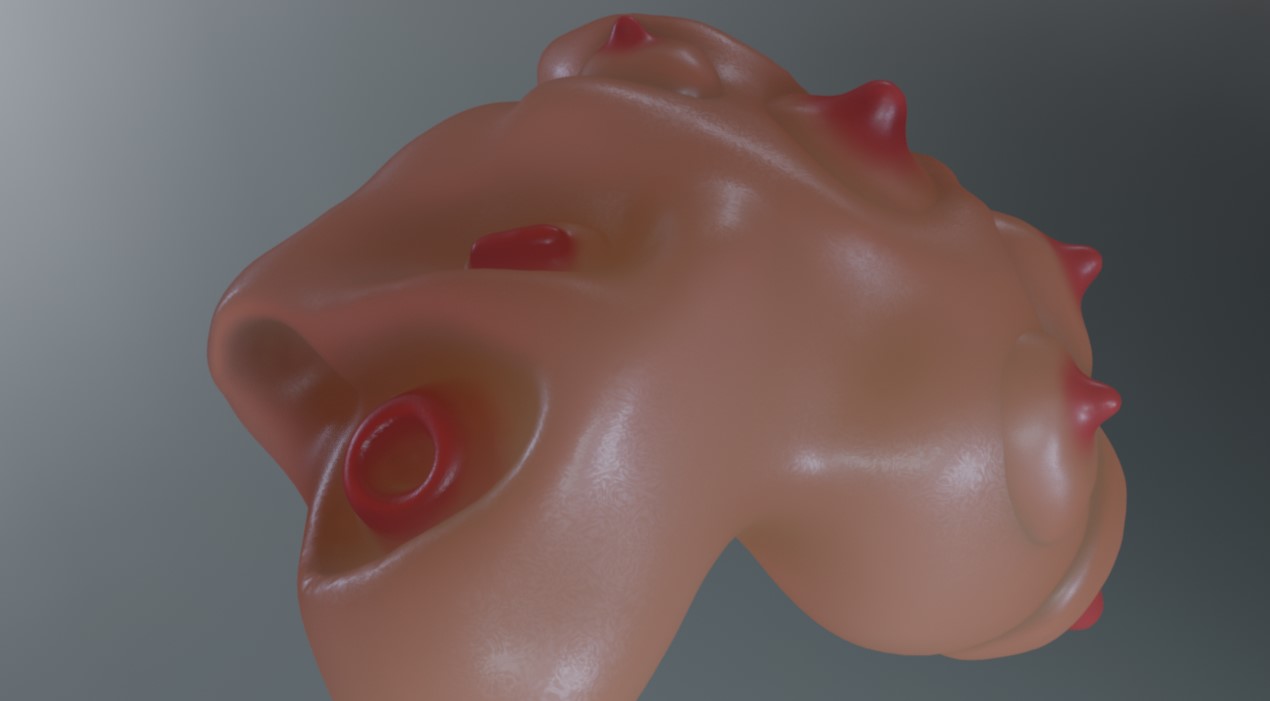
EXO:ORGAN – sketch IV – touch sensitive areas
-

-

-

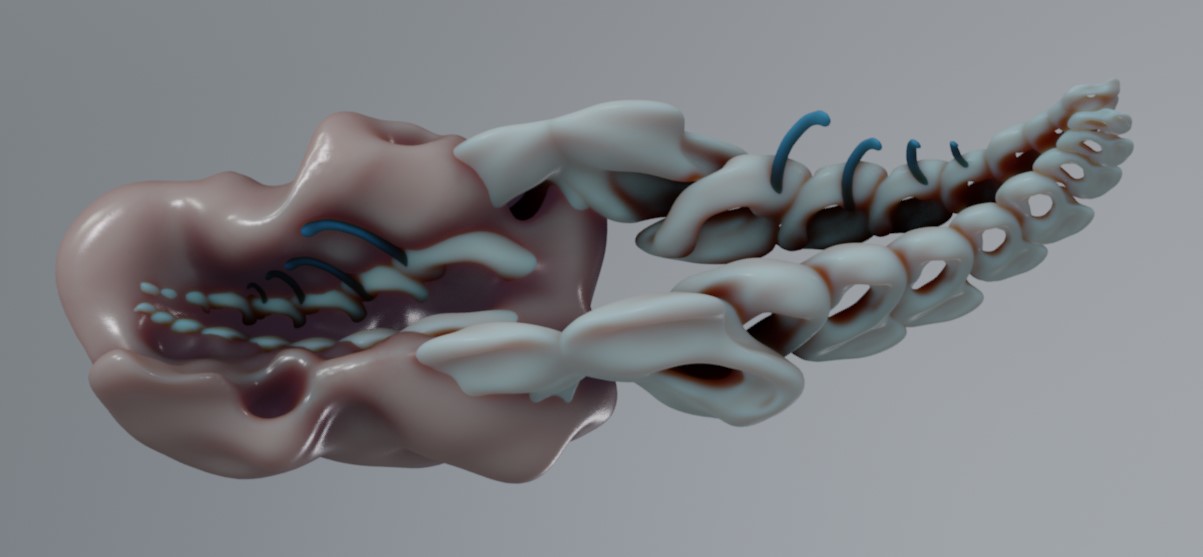
modular support structure & inner/outer
Creating devices with a fullform approach limits the potential of working with organic forms. As inspired by nature, it is obvious to work with bone like support structures to make twisting or moving limbs possible.
POSTORGAN – user interface sketch III bone and lymbic structures may form the outer shell
-
-
-
POSTORGAN – user interface sketch II inspired by organic forms, morphed shapes and extensions
-

-
-
POSTORGAN – user interface sketch inspired by organic forms
-
-

-


-

-
-
The game pod of eXistenZ

eXistenZ by David Cronenberg | 1999 |
-

-
eXistenZ by David Cronenberg | 1999 |
-

-
eXistenZ by David Cronenberg | 1999 |
-

-
eXistenZ by David Cronenberg | 1999 |
-

-
eXistenZ by David Cronenberg | 1999 |
-

-
eXistenZ by David Cronenberg | 1999 |
-

-
eXistenZ by David Cronenberg | 1999 |
-

-
eXistenZ by David Cronenberg | 1999 |
-

-
eXistenZ by David Cronenberg | 1999 |
Science Fiction Frames: eXistenZ and Cybernetics by Peter Nagy
texture and health
As each organic system is in a constant change of energy and health, this status can be observed right on the morphology and surface of the organ. Variations of health or warmth can be communicated directly throgh the surface patterns and the haptics of the synthetic organ itself.
surface and health – sketch one – view 3
surface and health – sketch one – view 2
surface and health – sketch one – view 1
With the progressive automation and quantification of our working and living environment through digital tools, the interface between the digital world and our actual body is becoming more relevant. The need lies in the discrepancy that our bodies have a sensory range that is nearly untouched in today’s virtual realities. This circumstance increasingly separates us from reality and not at least, from each other.
With a wink, most of us can already call ourselves cyborgs today, as we are connected to global networks, databases and algorithms through our wearable digital devices. Almost as if these devices have become a necessary part of our body.
The work EXO:ORGAN is an artistic vision in which this relationship between our human body and the digital world is further drawn in a more eccentric way. Inspired by the idea of an external organ or an exoskeleton that organically, biologically expands our body into the digital world in various sensual ways.
Since birth, growth, decay and death are a crucial part of our concept of life, these devices were designed with this idea in mind. As a consequence, all materials used must be of a biological nature or at least be sustainably decomposable. Electronic circuits and calculations focus on energy efficiency, low power harvesting, modularity and alternative conductive materials. Although this sounds utopian, most of this technology is already available. EXO:ORGAN is an artistic attempt to put an optimistic, human-centered utopian narrative up for discussion.
skin, hulls – the inner and outer
hully I – two component user interface

The distinction between inner and outer can be observed widely in the world of living beeings. The need for protection and inter/exchange of matter between internal processes and the outer world is mainly the epidemis use. What can we learn from this idea in respect to the world of digital interaction?
surface studies, interfacing through haptics
The haptics of a surface is simply one component of a broad tactile experience we are capable to have with our only hands – calling the elasticify of the object, it’s plasticity, its temperature, the moistness and slipperyness of the surface, which is defined by the material used. The utilization of progressive shapes, inspired by nature, like lamellae, dentrides, bumps, groves or holes can extend this experience even further. The following sketches show possible scenarios of this idea.
holes and nibbler – sketch of flexible interface within the volume
As synthetic forms mimik the shapes of our bodies, we immediately get an idea of its haptics, it’s behaviour in motion and possible sensitive areas : as we create associations with areas like the inner ear, the mouth, nose or eye. Underlying bone and muscle structure is therefore not concious, but a crutial part of the reception, what part might be moveable and which not.

wet or dry!
wet vs. dry study – moisture and slippery of the surface
Speaking of wetware – the properties of the surface can become another layer for information. As areas of out bodies are wet, they can be defined as special interfaces between inner and outer body – therefore these areas are very sensitive.
TODO !
#1 Hot/cold
#2 inner hohlräume > different bending pressure behaviour!
lamellea flat version
lamellea flat version – those flexible lamellea can be stroked or deformed by the finger. The amorph structure gives a nonvisual feeback of orientation due lamellae scale difference
lamellea distinctive version
lamellea distinctive version
lamellea distinctive illuminated version – integrated LED light is a obvious enhancement for any interaction scenario
integrated electronic ink & experimental hand device
EXO:ORGAN – sketch V

experimental soft interaction elements
Common user interface design the the digital world is widely based on stiff materials like plastics, glass or metal. Fabric, silicone or bio materials offer different challenges and opportunities compared to conventional, well know user interactions. This series attempts to discover possible sensory and tactile „sensors“ and modules besides the button we know 🙂
NIBBLER – this interface is obvioulsy refering to the nipple, as we know it as a very sensitive part of out body surface – this might work as multidimensional joystick both directional and pressurewise

Sensors or interaction elements reveal their potential only when applied to a specific shape and use. Therefore this device migth describe a pressure sensitive device for both hand and finger interaction.
EXO:ORGAN – sketch IV – touch sensitive areas

modular support structure & inner/outer
Creating devices with a fullform approach limits the potential of working with organic forms. As inspired by nature, it is obvious to work with bone like support structures to make twisting or moving limbs possible.
POSTORGAN – user interface sketch III bone and lymbic structures may form the outer shell
POSTORGAN – user interface sketch II inspired by organic forms, morphed shapes and extensions

POSTORGAN – user interface sketch inspired by organic forms


The game pod of eXistenZ
eXistenZ by David Cronenberg | 1999 |
-
- eXistenZ by David Cronenberg | 1999 |

-
- eXistenZ by David Cronenberg | 1999 |

-
- eXistenZ by David Cronenberg | 1999 |

-
- eXistenZ by David Cronenberg | 1999 |
-
- eXistenZ by David Cronenberg | 1999 |

-
- eXistenZ by David Cronenberg | 1999 |

-
- eXistenZ by David Cronenberg | 1999 |

-
- eXistenZ by David Cronenberg | 1999 |

Science Fiction Frames: eXistenZ and Cybernetics by Peter Nagy